
1. 上位机实时采集机器人各轴扭矩,如何实现?
2. PCSDK未提供直接读取扭矩接口,但RAPID中可以通过指令
GetJointDataMechUnit:=ROB_1,1Torque:=reg1,读取1轴的扭矩并存储于reg1
3. 可以在RAPID创建后台程序,实时读取各轴扭矩。
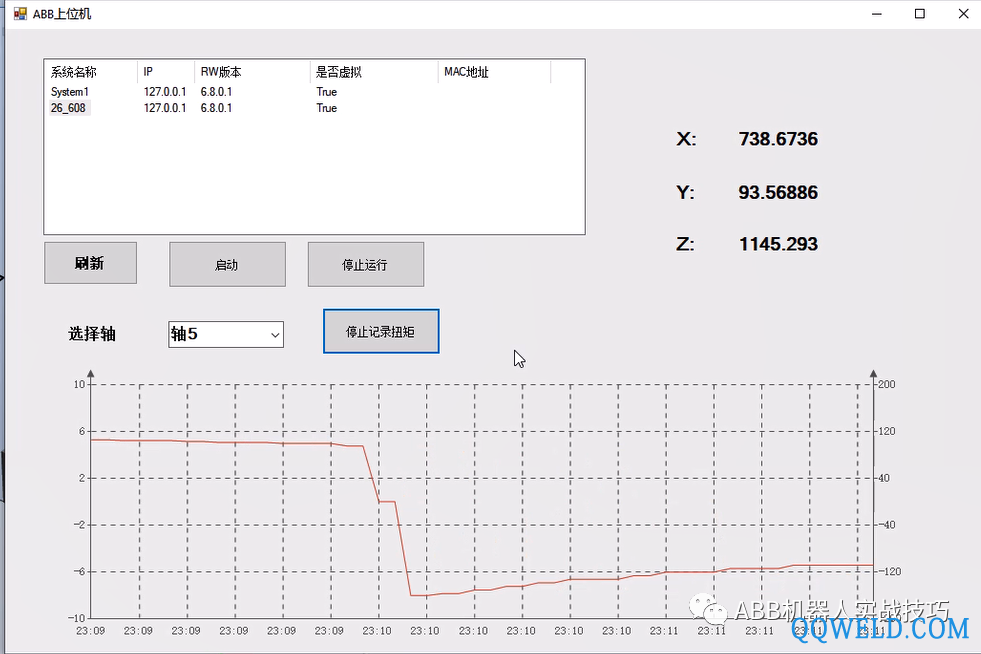
4. 上位机根据选择,读取对应各轴扭矩数值并以曲线形式显示。
5. 机器人创建后台任务,并编写代码。编写完毕将后台任务设为semistatic,即开机自启动
var num axis_tor_arr{6}:=[0,0,0,0,0,0];
PROC main()
WHILETRUEDO
FOR i FROM 1 TO 6 DO
GetJointDataMechUnit:=ROB_1,iTorque:=axis_tor_arr{i};
!将各轴扭矩存储于数组中
ENDFOR
waittime 0.1;
ENDWHILE
ENDPROC
6. 为方便以曲线形式显示数据,这里使用HSLcomponent库中的user_curve控件(HSLcomponent获取方式见 上位机仪表盘实时显示机器人速度)
7. 在上位机插入user_curve控件,做相应设置。
8. 对“启动记录”按钮创建代码如下:
Timer timer;
//通过定时器定时获取当前各轴扭矩
bool t_record = false;
privatevoid button2_Click_1(object sender, EventArgs e)
{
if (t_record == false)
{
userCurve1.SetLeftCurve("A", newfloat[] { }, Color.Tomato);
//创建空曲线
timer.Tick += (sender1, e1) =>
{
RapidData rd = controller.Rapid.GetRapidData("t2", "module1", "axis_tor_arr");
//获取任务t2下的module1下的axis_tor_arr数组
if (rd.IsArray)
{
ArrayData ad = (ArrayData)rd.Value;
//转化数组
float t1 = Convert.ToSingle(ad[comboBox1.SelectedIndex].ToString());
//根据选择的comboBox1序号,显示对应轴扭矩
if (comboBox1.SelectedIndex > 2)
{
userCurve1.ValueMaxLeft = 10;
userCurve1.ValueMinLeft = -10;
}
//调整Chart的显示上下限
else
{
userCurve1.ValueMaxLeft = 300;
userCurve1.ValueMinLeft = -300;
}
userCurve1.AddCurveData("A", t1);
//将当前数据填入
}
};
timer.Start();
t_record = true;
button2.Text = "停止记录扭矩";
}
else
{
timer.Stop();
t_record = false;
button2.Text = "开始记录扭矩";
}
}
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 Ehave
Ehave 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 全自动焊接流水线
全自动焊接流水线 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 供应发电电焊机,便携式电焊机,汽油发电电焊机厂家直销供货
供应发电电焊机,便携式电焊机,汽油发电电焊机厂家直销供货 英鹏焊接机器人YPJQ-1800
英鹏焊接机器人YPJQ-1800 专业 悬臂管子自动焊机(气保焊)
专业 悬臂管子自动焊机(气保焊) 组合式 自动环缝焊接管法兰圆周变位机 焊接转盘
组合式 自动环缝焊接管法兰圆周变位机 焊接转盘 美蓝环保MLWF70 高负压除尘器 焊接机器人除尘系统 滤筒除尘器
美蓝环保MLWF70 高负压除尘器 焊接机器人除尘系统 滤筒除尘器 程煤激光切割机 大型激光切割机 双驱光纤激光切割机
程煤激光切割机 大型激光切割机 双驱光纤激光切割机 TIG、热丝TIG焊接机器人
TIG、热丝TIG焊接机器人 供应 越达 双立柱焊接变位机(非标)
供应 越达 双立柱焊接变位机(非标)








