
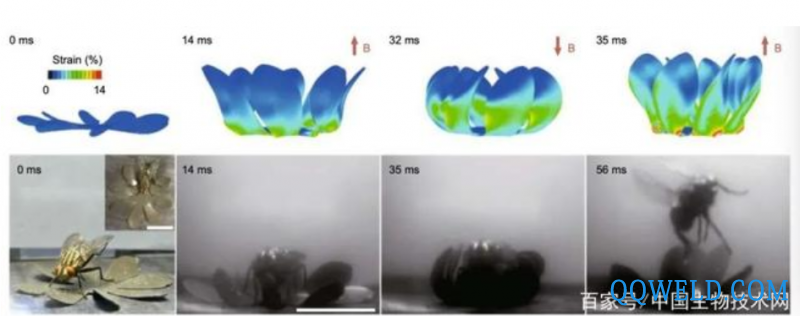
对于自然界的生物而言,高速行动对捕猎、逃跑和飞行至关重要。这一点对于软体机器人也一样有用,因为它使机器人可以捕捉快速移动的物体,并对周围动态环境迅速做出反应。 但是,要在机器人身上复制这种高速行动非常具有挑战性。电动机可以在“硬体”机器人身上模仿这种行为,但使用的是一些基于塑料或橡胶等材料所制造的便宜而简单的机器人系统。 而此次,德国亥姆霍兹德累斯顿罗森多夫研究中心的科学家丹尼斯·马卡罗夫、奥地利约翰·开普勒林茨大学马汀·卡尔滕博纳及他们的同事,展示了磁驱动高速软体机器人的设计原理、材料和制作工艺。他们在机器人体内嵌入微小的磁体,快速响应磁场,使机器人可以根据它们具体的形状移动。在演示中,机器人可高速完成行走、游泳、漂浮和捕捉活体苍蝇等运动。譬如,一个花形机器人在一只苍蝇触发陷阱后捕捉了它,随后张开磁驱动的八臂又释放了它;一个三角形机器人可以在空中快速自我卷曲并向前行走;一个六臂机器人可以抓取、运输和释放无磁性物体;模拟蝠鲼形态的机器人可以在水中带着物品游泳;而放置于透明玻璃管中的四臂机器人,可在3.7mT磁场作用下漂浮。 研究人员表示,这种设计取得了迄今已报道的软体机器人最高的比能量密度,这对于低磁场下的高速驱动很关键。 这种机器人可快速适应各种环境条件,在有限的环境中激发生物医学潜能,并可以作为模型系统来开发受自然启发的复杂动作,同时,这些机器人也可用于生物组织工程——作为更大的机器人系统的组成成分,或可用于研究高速行动生物体的生物力学响应。
总编辑圈点 由于软体机器人的力学特性,其运动可能会变得不可预测,因此也难以控制。但是,科学家现在证明软体机器人不仅可以精确控制,而且能完成异常难度的运动。行走游泳只是小菜一碟,悬浮和运货也不在话下,甚至当速度足够快时,还可以活捉苍蝇。这一成果激发了生物组织工程领域未来的研究,可以说,这种新型软体机器人会成为研究快速生物机械过程——如快速移动生物体的流体动力学和空气动力学的一个模型范本。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 全自动焊接流水线
全自动焊接流水线 Ehave
Ehave 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 SAVEST防爆三瓶气瓶柜 实验室气瓶存储柜 上海晋名
SAVEST防爆三瓶气瓶柜 实验室气瓶存储柜 上海晋名 氩弧焊机TIG/WS-315A 300A 家用逆变式直流脉冲氩弧焊机 氩弧 电弧两用焊机
氩弧焊机TIG/WS-315A 300A 家用逆变式直流脉冲氩弧焊机 氩弧 电弧两用焊机 铸造碳化钨焊条 铸造管状合金耐磨焊条 气焊条
铸造碳化钨焊条 铸造管状合金耐磨焊条 气焊条 沪工电焊机
沪工电焊机 优势 安川机器人 MA 2010 6轴 负载10KG 焊接机器人
优势 安川机器人 MA 2010 6轴 负载10KG 焊接机器人 瑞凌东升氩弧焊机不锈钢焊机WS-400逆变直流 氩弧焊机
瑞凌东升氩弧焊机不锈钢焊机WS-400逆变直流 氩弧焊机 滚轮架_自调式滚轮架_焊接滚轮架-河南省煤科院耐磨技术有限公司
滚轮架_自调式滚轮架_焊接滚轮架-河南省煤科院耐磨技术有限公司 焊接机器人
焊接机器人








