
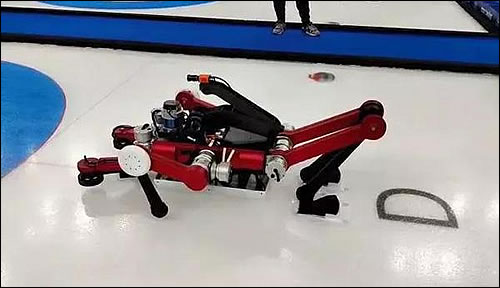
2月18日下午,一位特殊的机器人“选手”在“冰立方”进行了冬奥会首秀:冰壶投掷表演。只见它一双中“腿”支撑身体,一双后“腿”蹬踏起踏器,用一双前“腿”为双“手”,控制冰壶的方向和移动以及旋转速度,奋力一投,击中目标!
这位冰壶机器人“选手”可不一般。小布了解到,它是世界上首款模仿人蹬踏、支撑滑行、旋转冰壶行为方式的六足冰壶机器人。受到科技部国家重点研发计划“科技冬奥”重点专项支持,由上海交通大学机械与动力工程学院教授高峰领衔,上海交通大学与上海市智能制造研发与转化功能型平台组成的六足冰壶机器人研究团队研发。
具备人类投掷冰壶三种行为功能
冰壶14世纪起源于苏格兰,是当时人们时髦的运动方式,从1998年开始,冰壶被列为冬奥会正式比赛项目。投掷队员半蹲在冰面上滑行,轻轻旋转冰壶控制出手方向;两名队友可以在冰壶前用特制的冰刷刷冰面,以控制方向和速度,非常考验参与者的体能和脑力。
2018年平昌冬奥会后,国际上出现了轮式冰壶机器人,它主要是通过轮子驱动前行的,和人投掷冰壶的行为还有所区别。
“人投掷冰壶时,一条腿支撑身体,另一条腿蹬踏起踏器,眼睛瞄准目标,手控制冰壶的速度和方向,是一个复杂的决策行为。怎样根据人投掷冰壶的行为特征,设计机器人的结构;如何根据视觉与力觉测量的信息,辨识冰面与机器人接触的动力学参数,从而预测机器人滑行和冰壶运动的轨迹;如何根据人类投掷冰壶的决策方法来控制机器人的行为,这些都是我们开发六足冰壶机器人遇到的技术挑战。”高峰介绍说。

而此次上海交通大学设计的这款六足机器人,就具备了人类投掷冰壶的三种行为功能:手控制冰壶的方向和旋转速度、一条腿的足支撑身体、另一条腿蹬踏起踏器。这也是世界上首次出现模仿人蹬踏、支撑滑行、旋转冰壶等行为方式的六足冰壶机器人。
让机器人实现人的行为决策方式
在冬奥会冰壶赛场表演冰壶比赛不仅是一次体能竞赛,也是一场智力博弈。因此,研究团队需要根据人投掷冰壶的行为特征来训练机器人,让机器人实现人的行为决策方式。
在投掷冰壶过程中,六足机器人前部双腿转化为人手的功能,实现抱壶和旋转壶的运动;中部双腿的膝盖和前部双腿的肘关节复合成四点接触冰面,形成人支撑腿的功能;后部双腿蹬踏起踏器,实现推动机器人加速滑行的功能,另外,前部双腿具有在机器人滑行运动过程中二次掷壶来控制冰壶运动的方向、速度和角速度,实现精准投壶和击打功能。
投掷冰壶动作结束后,机器人从投掷冰壶的构态转换成站立构态,可以进行冰面行走和寻找起踏器。
冰面的粗糙度和摩擦特性受冰面的制作和使用时间长短的影响明显,机器人要通过视觉和力觉检测信息,辨识冰面的摩擦特性,来建立机器人和冰壶的动力学模型,从而实现机器人运动特征规划和精准的冰壶投掷、击打。
可当“陪练员”,还能打“人机”冰壶赛
科研团队介绍,六足冰壶机器人能模仿人投掷冰壶的行为,具有视觉和力觉感知能力,能实现冰壶投掷运动的数字化,成为冰壶运动员日常训练器材,也可以辅助运动员投掷冰壶的决策与规划,给运动员当陪练员。

在冰壶比赛间歇,冰壶机器人或人机竞赛进行的投掷冰壶表演,也能给冰壶比赛增添不少乐趣,让更多人喜欢上冰壶运动,并激发青少年对科创的兴趣。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 Ehave
Ehave KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 【奥神】直流脉冲氩弧焊机WSM-250P 氩弧焊机
【奥神】直流脉冲氩弧焊机WSM-250P 氩弧焊机 高能激光 东北激光切割机 广告激光切割机 大包围光纤激光切割机
高能激光 东北激光切割机 广告激光切割机 大包围光纤激光切割机 厂家供应 电焊机 弧焊机 直流弧焊机 性能稳定 高负载持续率
厂家供应 电焊机 弧焊机 直流弧焊机 性能稳定 高负载持续率 美国SMC INCO-WELD C-276 焊条
美国SMC INCO-WELD C-276 焊条 山东鹏沃PW-120A等离子切割机 供应光纤激光切割机 激光切割机 激光切割机切割质量好
山东鹏沃PW-120A等离子切割机 供应光纤激光切割机 激光切割机 激光切割机切割质量好 SAVEST全钢气瓶柜厂 带报警双瓶气瓶柜定制商 上海晋名
SAVEST全钢气瓶柜厂 带报警双瓶气瓶柜定制商 上海晋名 家用电焊机190A汽油焊机介绍
家用电焊机190A汽油焊机介绍 车间自循环烟尘净化器 激光切割、焊接等工况产生的烟尘治理。
车间自循环烟尘净化器 激光切割、焊接等工况产生的烟尘治理。








