
1. IRB1410 机器人为典型的带连杆的ABB机器人,J3电机如图所示。J3电机置于底部,可以减轻上部的机构重量

2. 运动时,J3电机带动J3连杆。3轴,J3连杆,上臂和后端连杆构成如图的平行四边形结构。
3. 所以,若2轴电机转动,但3轴电机不转动,此时3轴和大臂的夹角会变化(没有连杆的机器人,2轴电机转动,3轴电机不转动,3轴和大臂夹角不会变化)
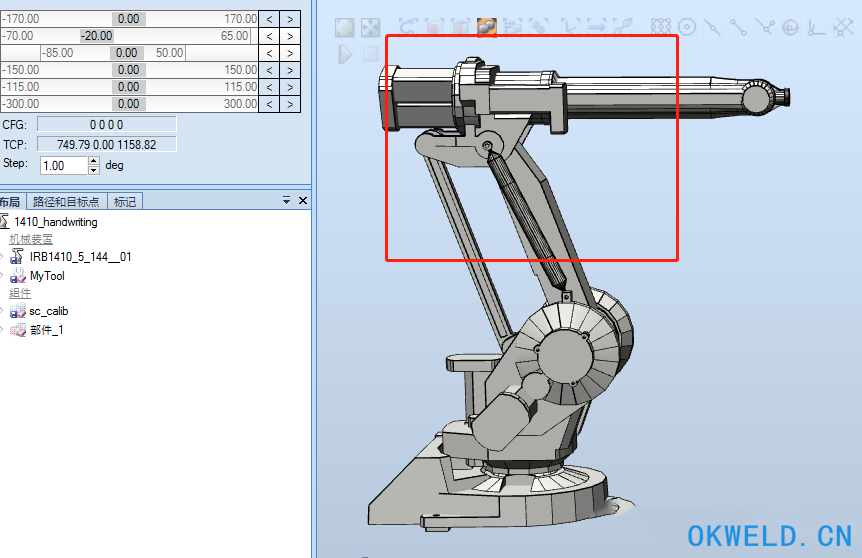

以上两幅图片,3轴均为0度,但由于2轴转动,3轴与大臂夹角不一样
4. 对于不带连杆的机器人正运动学,可以通过dh参数转化为各个轴的位姿矩阵,将6个位姿矩阵右乘即可得到当前机器人末端的笛卡尔坐标,具体参见 机器人如何从各轴角度算出当前XYZ
5. 但对于带连杆机器人,2轴的变化会导致3轴与大臂夹角发生变化。由于平行四边形结构的缘故,实质3轴与大臂夹角变化刚好等于2轴变化角度的负数。
6. 故在位姿矩阵右乘时,只需在右乘到轴3 矩阵后,再右乘一个旋转矩阵,将夹角补偿回来即可。
7. 1410机器人DH参数如下


8. 针对1410类似带连杆机器人,机器人正运动学RAPID实现方法如下
LOCALVAR num alpha{6}:=[0,-90,0,-90,90,90];
LOCALVAR num a{6}:=[0,150,600,120,0,0];
LOCALVAR num theta{6}:=[0,-90,0,0,-180,0];
LOCALVAR num d{6}:=[475,0,0,720,0,85];
!1410 机器人DH参数
VAR num no_dependent;
!3轴与大臂夹角
PROC test_dh_pose()
VAR num curr_angle{6}:=[0,0,0,0,0,0];
VAR pose pose10{6};
VAR pose pose_cal:=[[0,0,0],[1,0,0,0]];
VAR jointtarget jtmp;
jtmp:=CJointT();
curr_angle{1}:=jtmp.robax.rax_1;
curr_angle{2}:=jtmp.robax.rax_2;
curr_angle{3}:=jtmp.robax.rax_3;
curr_angle{4}:=jtmp.robax.rax_4;
curr_angle{5}:=jtmp.robax.rax_5;
curr_angle{6}:=jtmp.robax.rax_6;
FOR i FROM 1 TO 6 DO
IF i=3 THEN
no_dependent:=-curr_angle{2};
!夹角等于2轴运动的负数
endif
pose10{i}:=f_dh2pose(i,alpha{i},a{i},theta{i}+curr_angle{i},d{i});
ENDFOR
FOR i FROM 1 TO 6 DO
pose_cal:=PoseMult(pose_cal,pose10{i});
ENDFOR
ENDPROC
FUNC pose f_dh2pose(num i,num alpha,num a,num theta,num d)
VAR pose pose1:=[[0,0,0],[1,0,0,0]];
pose1:=PoseMult(pose1,[[0,0,0],orientzyx(0,0,alpha)]);
pose1:=PoseMult(pose1,[[a,0,0],orientzyx(0,0,0)]);
pose1:=PoseMult(pose1,[[0,0,0],orientzyx(theta,0,0)]);
pose1:=PoseMult(pose1,[[0,0,d],orientzyx(0,0,0)]);
IF i=3 THEN
pose1:=PoseMult(pose1,[[0,0,0],orientzyx(no_dependent,0,0)]);
endif
!针对轴3坐标系,需要再多乘一次旋转,将夹角补偿回来
RETURN pose1;
ENDFUNC
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 全自动焊接流水线
全自动焊接流水线 Ehave
Ehave KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 萧山和面机/萧山和面机厂家/萧山和面机售后
萧山和面机/萧山和面机厂家/萧山和面机售后 焊条/塑料焊条/环保PP焊条4*4*6mm/易焊接焊接牢固PP焊条
焊条/塑料焊条/环保PP焊条4*4*6mm/易焊接焊接牢固PP焊条 ,华荣WS-250 逆变直流氩弧焊机 不锈钢家用便携式焊机 电弧稳定
,华荣WS-250 逆变直流氩弧焊机 不锈钢家用便携式焊机 电弧稳定 越达-厂家专业生产焊接辅机_焊接滚轮架 自调行走60吨滚轮架系列
越达-厂家专业生产焊接辅机_焊接滚轮架 自调行走60吨滚轮架系列 供应焊机、氩弧焊机、电弧焊机、弧焊机
供应焊机、氩弧焊机、电弧焊机、弧焊机 供应博塔重工可调式60吨滚轮架 焊接滚轮架
供应博塔重工可调式60吨滚轮架 焊接滚轮架 氩弧焊机,逆变直流脉冲氩弧焊机,WSM-400P
氩弧焊机,逆变直流脉冲氩弧焊机,WSM-400P 工业包装膜和亮膜的区别
工业包装膜和亮膜的区别








