
机器人是最典型的机电数字设备,具有高附加值和广泛的应用。作为先进制造业和信息社会产业的支撑技术,它在未来的生产和社会发展中发挥着越来越重要的作用。自20世纪下半叶以来,世界机器人工业一直保持稳定增长。根据发达国家工业发展和现代化的进程,以及工业机器人产业化的趋势,到2015年,中国机器人市场的容量约为10万台。工业机器人构造和工作原理是什么?
1.工业机器人工作原理
工业机器人是一种生产设备,其主要功能是确保工作所需的运动和动力。其主要工作原理是通过机械手运动部件的运动,自动实现工艺品的操作功能和技术要求。因此,在基本功能和基本工作原理方面,工业机器人和机床具有相同的特点:其终端驱动器具有位置变化要求,终端驱动器的位置变化要求通过坐标运动来实现。当然,机器人也有自己独特的要求,主要是关节形式,机器人需要很大的灵活性,刚性和精度要求相对较低。
2.工业机器人设计系统
机器人的功能可分为四个部分:操作员、终端启动器、传感器系统和控制器。操作员:由底座、手和手腕、传动机构、驱动系统等组成。其功能是改变手腕上的一定工作空间并调整手腕,使终端驱动器满足操作要求。终端启动器:也称为工业机器人手,是一种安装在手腕上的工业机器人部件,允许直接抓住或操作工件。传感器系统:表示机器人可以像人类一样高效地完成工作。感官功能应评估外部感官功能。战术通常与机器人控制相关。视觉用于检测物体的存在、其近似位置、位置和其他状态。另一方面,触摸可以帮助你看清。它可以检测对象的精细状态。控制器:机器人控制系统是机器人的大脑,是决定机器人功能和性能的主要因素。它主要控制工业机器人在工作空间中的运动位置、位置和轨迹、工作顺序和操作时间。它具有编程简单、软件菜单操作、人机界面友好、在线操作快捷方便等特点。机器人使用的控制系统有:点和轮廓;同步和异步;数字和模拟。控制系统的特殊方案可根据机器人的技术和经济要求以及过程任务的特点进行选择。
3.1手腕结构的确定
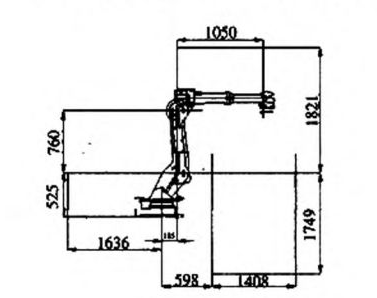
手腕是连接手和终端触发器的部分。其任务是在工作空间中实现手和座椅终端驱动器的三个位置,并在工作空间内实现终端驱动器的四个位置(方向),即实现三个旋转自由度。通过机械接口连接和支撑终端驱动器。根据机器人的性能要求确定自由度。
3.2谐波齿轮的选择
谐波齿轮减速器是一种新型的机械传动机构。与传统变速器相比,它具有小、轻和简单的结构。与具有等效传动的传统减速器相比,其零件减少了50%。体积和重量减少约1、3或更多。传动比范围大(单级传动比40~350,多级传动比可达16000~10000),传动效率高(单级效率≥85%),传动精度高,承载能力强。根据所选发动机。选择SGMAH-OIA作为模型。额定功率为looW,0.318N·m,额定转速为3000漏极交流伺服电机。立即选择。XBl谐波减速器
4.机器人轴承设计
滚珠轴承是机器人和机械机构最常用的轴承。它可以承受径向和轴向载荷。低摩擦。机器人专用轴承的四点接触设计和高精度加工。这种轴承比传统的四点接触轴承轻25倍。它的内圈(或外圈)正好由两个半环组成。整个外圈(或内圈)凹槽的曲率半径很小,因此钢球在四个“点”上接触内圈和外圈。它不仅增加了径向载荷,而且能够以紧凑的尺寸承受两个方向的轴载荷,并且由于其轴间隙相对较小,在两个方向上具有良好的轴限制能力。接触角(通常为35)较大。工业机器人用薄壁四点接触球轴承通常有密封圈,但没有密封圈(见图4)。它由一个
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 全自动焊接流水线
全自动焊接流水线 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 Ehave
Ehave 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 越达供应自调行走焊接滚轮架 自调式滚轮架 自调式滚轮架终身维修 品质保证
越达供应自调行走焊接滚轮架 自调式滚轮架 自调式滚轮架终身维修 品质保证 工厂销售各种直径分样筛 标准筛
工厂销售各种直径分样筛 标准筛 供应48V 50Ah 低温储能锂电池组
供应48V 50Ah 低温储能锂电池组 爱国焊接机器人焊接 自动焊机器人定制 性能稳定
爱国焊接机器人焊接 自动焊机器人定制 性能稳定 万业A402不锈钢焊条E310-16焊条 A402白钢焊条402焊条
万业A402不锈钢焊条E310-16焊条 A402白钢焊条402焊条 金象氩弧焊机
金象氩弧焊机 欢颜HY1006A-144 氩弧焊机器人,高效焊接
欢颜HY1006A-144 氩弧焊机器人,高效焊接 无锡爱阁宝HGZ-200 焊接滚轮架 滚轮架价格
无锡爱阁宝HGZ-200 焊接滚轮架 滚轮架价格








