
与协作机器人产品相关的技术可分为三个主要领域,即感知、感知和结构。这三个领域涵盖了现阶段使用机器人产品的整个过程,即感知足够准确的环境信息,形成对环境的合理理解,并通过处理这些数据来完成任务,以及通过结构机制为准确高效的操作提供适当的方案。协作机器人的基本技术包括机器人的视觉、传感器和控制系统。难点在于如何实现机器人协作以及如何处理复杂环境中的机器人行为。协作机器人有哪些核心技术组成?技术难点是什么?

1、机器人的视觉检测技术可以检测机器人周围的环境,实现协作。问题是,机器人视觉技术需要准确和准确,才能正确识别周围的物体和环境。
2、机器人操作技术,包括程序开发、算法设计和优化能力。
3、机器人安全控制和检测技术包括智能机器人在各种极端环境下的稳定性、可靠性和抗灾救援能力。
机器人系统集成和服务包括研发、制造、销售、构建机器人服务平台以及机器人集成服务提供商的绩效。目前,几乎所有机器人技术的研发和创新都集中于提高三个领域的能力。在协作机器人产品领域,这三个领域的不同技术发展体现在安全性、易用性和灵活性方面。理解技术是机器人产品接收外部信息的方法和工具,也是实现机器人产品与人、环境和设备之间交互的关键技术领域之一。与传统的工业机器人不同,由于协作机器人的操作环境更加复杂,对人类交互的需求更高,使得机器人产品与人们的自然交流习惯相兼容成为工业技术发展的重要课题。
协作机器人有哪些核心技术组成?技术难点是什么?这意味着将先进技术集成到协作机器人产品传感技术领域,以便尽可能广泛地获取信息。除了传统扭矩传感器、激光传感器等产品技术的配置外,协同机器人产品的视觉学习、自然语言检测等功能也可以实现多模态信息输入,大大增加其通信能力。同时,5G通信、边缘计算机、网络大数据和工业互联网等许多新兴技术的实施和普及也加强了协作机器人产品和其他设备的通信能力,极大地扩展了感知外部信息的方式。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 Ehave
Ehave 全自动焊接流水线
全自动焊接流水线 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 越达供应自调行走焊接滚轮架 自调式滚轮架 自调式滚轮架终身维修 品质保证
越达供应自调行走焊接滚轮架 自调式滚轮架 自调式滚轮架终身维修 品质保证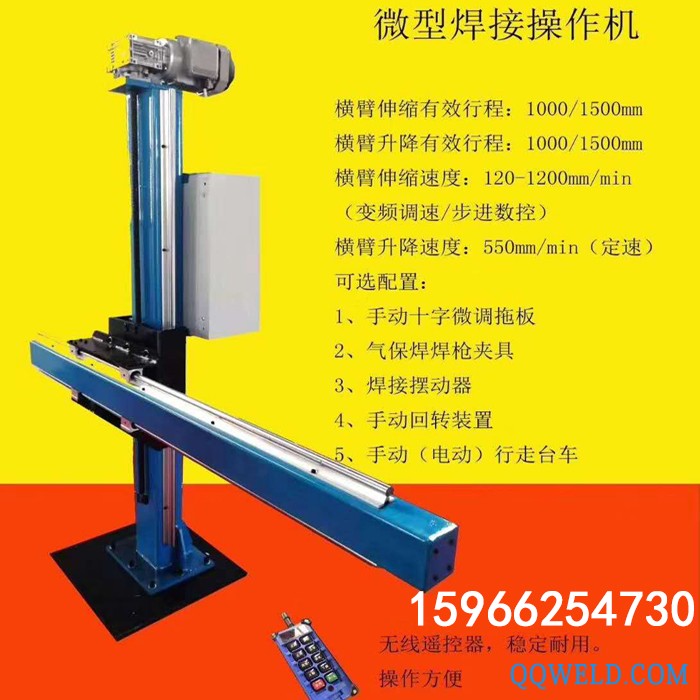 出售小型焊接操作机,无线遥控操作,动做灵活可以配气保焊机、埋弧焊、变位机、滚轮架二手卷板机 数控机床 二手机床 铣床
出售小型焊接操作机,无线遥控操作,动做灵活可以配气保焊机、埋弧焊、变位机、滚轮架二手卷板机 数控机床 二手机床 铣床 厂家搬运机器人六轴机械手臂自动焊接及机器人焊接机器人质量保障
厂家搬运机器人六轴机械手臂自动焊接及机器人焊接机器人质量保障 岳阳市 IRB 1600ID 焊接机器人 焊接机器人价格
岳阳市 IRB 1600ID 焊接机器人 焊接机器人价格 北京深隆STJ1092 非标定制焊接机器人 高强钢点焊机器人 军工行业自动焊接机器人 焊接机器人生产厂家 长春焊接机器人
北京深隆STJ1092 非标定制焊接机器人 高强钢点焊机器人 军工行业自动焊接机器人 焊接机器人生产厂家 长春焊接机器人 NB-500(IGBT)半自动气保焊机
NB-500(IGBT)半自动气保焊机 AEQUOR/爱国国产焊接机器人 焊接机器人研发厂家
AEQUOR/爱国国产焊接机器人 焊接机器人研发厂家 供应烽火氩弧焊机
供应烽火氩弧焊机








