
今天,小编给大家介绍一个西门子PLC入门级应用实例——简易机械手的控制。
下面进入正题:

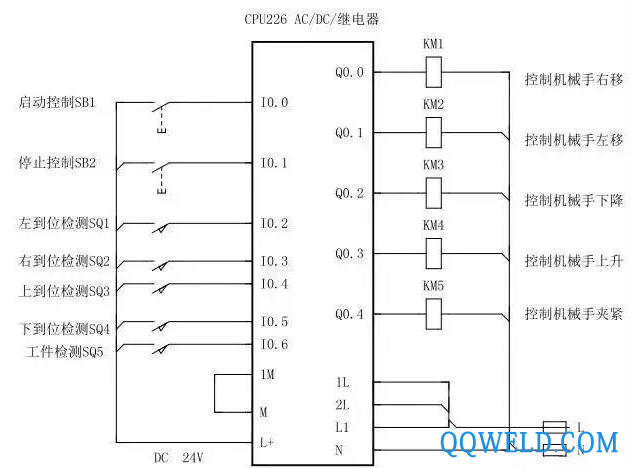
如上图所示,M1为控制机械手左右移动的电动机,M2为控制机械手上下升降的电动机,YV线圈用来控制机械手夹紧防松,SQ1为左到位检测开关,SQ2为右到位检测开关,SQ3为上到位检测开关,SQ4为下到位检测开关 ,SQ5为工件检测开关。
控制要求如下:
1.机械手要将工件从工位A移到工位B处;
2.机械手的初始状态(原点条件)是机械手应停在工位A的上方,SQ1、SQ3均闭合;
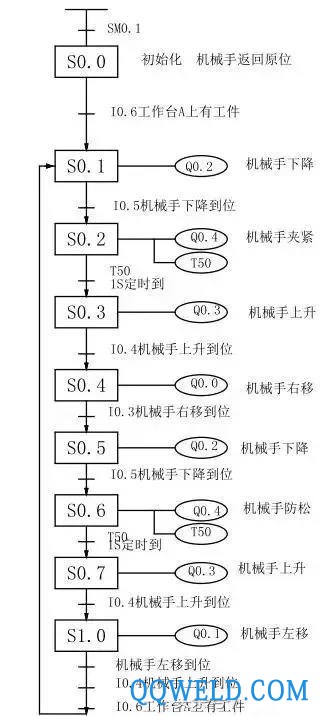
3.若原点条件满足且SQ5闭合(工件A处有工件),按下启动按钮,机械手按“原点→下降→夹紧→上升→右移→下降→防松→上升→左移→原点”的步骤工作。
如下图所示:
编程前理顺动作如何转移:
定义符号表:

硬件的接线图:
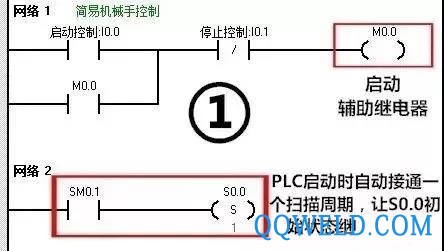
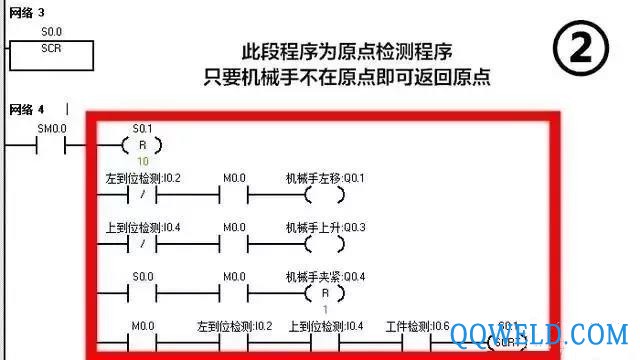
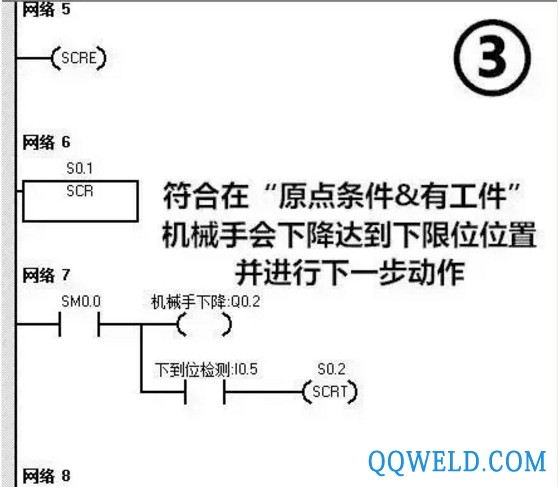
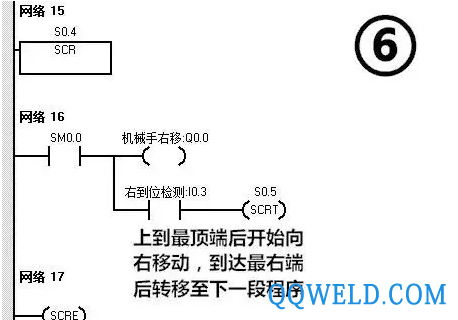
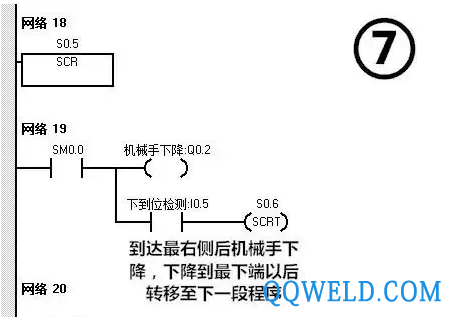
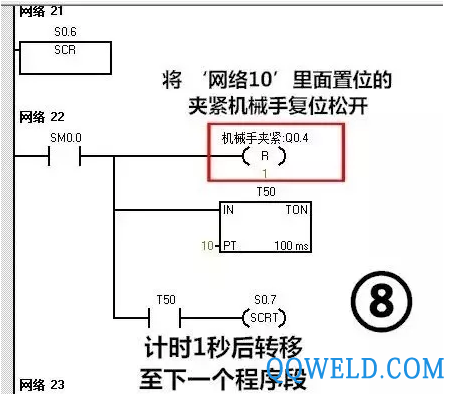
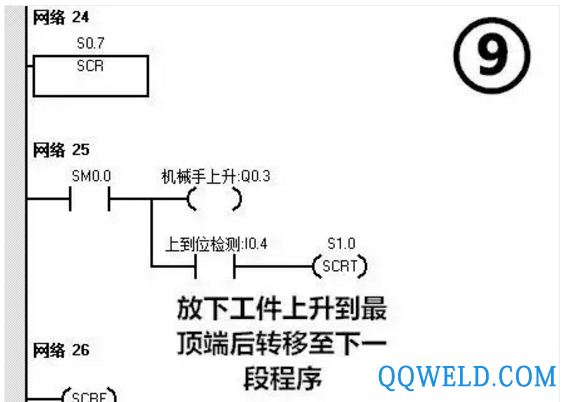
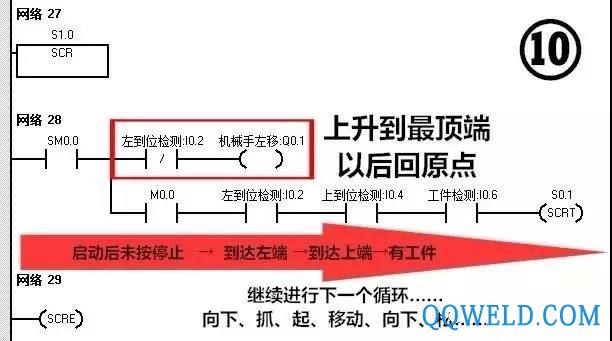
满足所有动作的程序如下:

下面我们一段一段分析这个机械手是如何工作的:


 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 Ehave
Ehave 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 日精机器人 焊接机器人
日精机器人 焊接机器人 供应精源JYD--03L电感线圈自动焊接机器人 焊接机
供应精源JYD--03L电感线圈自动焊接机器人 焊接机 瑞凌东升MFR280电焊机数字双脉冲气保焊机二保焊机批发铝焊机厂家
瑞凌东升MFR280电焊机数字双脉冲气保焊机二保焊机批发铝焊机厂家 自动焊接机器人订购 河北深度自动化厂
自动焊接机器人订购 河北深度自动化厂 直销MIG-500小型焊机 380V/三相双脉冲弧焊机 家用电焊机
直销MIG-500小型焊机 380V/三相双脉冲弧焊机 家用电焊机 郑州越达-焊接滚轮架 ZTX-60滚轮架系列
郑州越达-焊接滚轮架 ZTX-60滚轮架系列 长期供应不锈钢焊条 白钢焊条 不锈钢光亮条 304型材用焊条双相不锈钢焊条2.5mm3.2mm4.0mm
长期供应不锈钢焊条 白钢焊条 不锈钢光亮条 304型材用焊条双相不锈钢焊条2.5mm3.2mm4.0mm 富士龙大型锯骨机厂家直销
富士龙大型锯骨机厂家直销








