
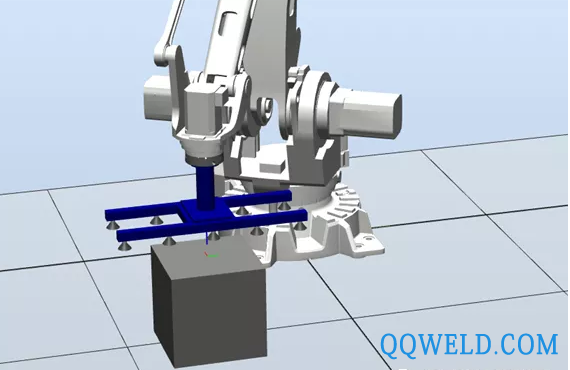
1. 要完上述视频的抓取与放置,通常都需要创建Smart组件,在Smart组件里对传感器,attacher,信号等进行一堆设置,通常很快把人绕晕。
2. 我只是想搬砖,为什么搬砖这么累???

3. Robotstudio提供一种非常简单的抓取与放置方法,不需要创建smart组件,几分钟搞定。
4. 例如上图视频,在ABB机器人到达抓取位置时,会将doGrip信号置为1以完成抓取。
5. 点击“仿真”下“配置”右下角三角,进入事件管理器
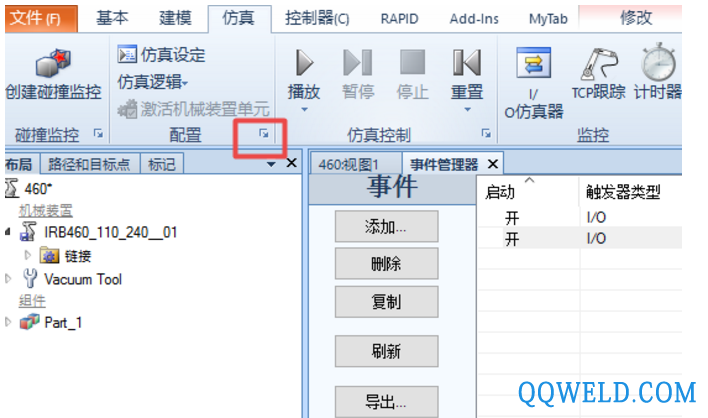
6. 点击“添加”,选择如下:
启动:开, 表示程序启动时生效
关, 表示程序启动时不生效
仿真, 表示仅启动仿真时生效

7. 选择信号doGrip为1时的动作

8. 附加对象表示抓取(对应英语为attach)
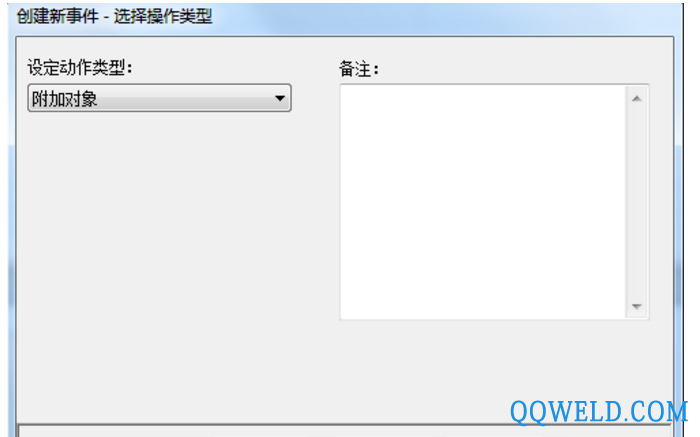
9. 选择要Attach的对象为最接近TCP的对象,安装到选择工具,选择“保持位置”(若选择更新位置,则会将最接近TCP 的对象的本地原点和安装工具的本地原点重合),点击完成

10. 再次新建一个事件,设置放置

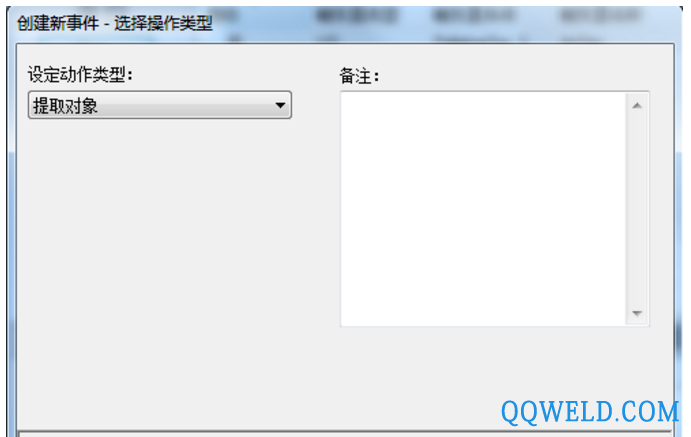
(提取对象对应英文是Detach)
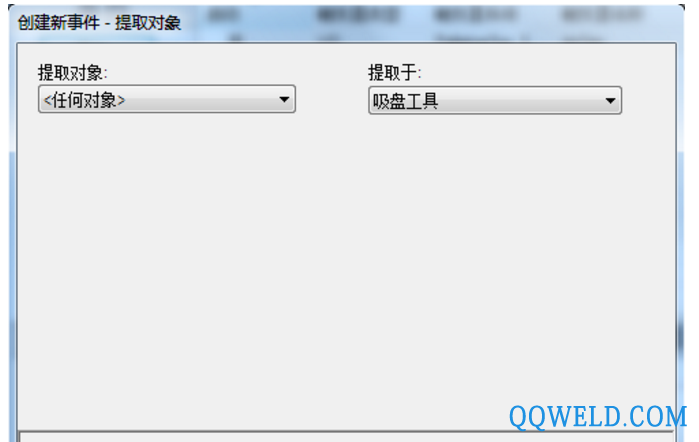
完成运行机器人程序,即可看到机器人开始搬砖了!!!
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 Ehave
Ehave 精密激光切割机
精密激光切割机 凯尔达WS-T250N氩弧焊机
凯尔达WS-T250N氩弧焊机 搪瓷反应釜规格中有什么要求?
搪瓷反应釜规格中有什么要求? 半自动汇流排
半自动汇流排 KUKAKR5R 1400焊接机器人
KUKAKR5R 1400焊接机器人 供应河南越达-越达ZT焊接滚轮架 橡胶轮滚轮架-特惠-质量保证-大厂家
供应河南越达-越达ZT焊接滚轮架 橡胶轮滚轮架-特惠-质量保证-大厂家 二手OTC焊接机器人almega EX-V6点焊机械手带控制柜
二手OTC焊接机器人almega EX-V6点焊机械手带控制柜 济南开元HJSB焊接设备 焊接机械 焊接机器人
济南开元HJSB焊接设备 焊接机械 焊接机器人








