
自动焊接,完全自主,无瑕焊缝–这是我们的愿景。工差间隙、夹紧公差和其他缺陷即将成为过去,或由机器人焊接系统进行自动补偿。这在某些方面可能仍有很长的路要走,但是许多机器人辅助系统已在帮助减少自动化批量生产中的人工干预。伏能士拥有广泛的高科技产品组合,凭借WireSense、SeamTracking、TouchSense以及TeachMode,可满足各种不同的应用需求。
自动化机器人焊接有诸多不同的辅助系统。它们都有一个共同的目标–防止循环时间浪费,并确保可靠的焊缝质量。传感器在这方面起着核心的作用;激光、摄像头乃至触觉传感器的设计,均用于检测工件是否位于正确位置,以及是否存在任何工差间隙。您还可定义系统的响应方式。然而,在安装与运行这种额外硬件的过程中,需要巨额费用的支撑–且投资成本通常极高。
更重要的是,虽然许多这样的系统确实提高了焊缝质量,但它们却会导致循环时间的浪费。它们的干扰轮廓通常也会限制工件的可达性,这就是伏能士提供替代方案来应对这些挑战的原因:对焊丝的高精度控制,加上TPS/i电源的极速数据传输,意味着焊丝还可用作传感器和填充金属–这是一种开辟全新可能性的方法。
运用WireSense检测边缘位置和工差间隙高度
荣获专利的WireSense技术配合焊接系统工作,使机器人能够检测边缘位置和板材间的工差间隙。为做到这一点,我们将焊丝打造成了高度传感器。在WireSense的扫描过程中,机器人首先到达所需位置。我们向焊丝提供低传感器电压,焊丝则通过100Hz范围内的焊丝回抽运动对工件进行扫描。若焊丝碰触到工件,则会引起难以察觉的短路。然后,通过抬高焊丝来消除短路。
TPS/i电源分析短路瞬间焊丝位置的变化,并将其作为高度信号传递给机器人。WireSense结合来自机器人控制器的位置数据和一开始所定义的参考点,可以精确记录工件上的每次几何变化。若机器人和WireSense于工件上沿一系列无穷尽的连续路径移动,并记录整个过程中的每一个点,则理论上就可构建出完整的3D工件轮廓。
在实践中,该传感器系统最重要的应用是边缘和高度检测,例如搭接接头。预先确定一个略低于板材边缘高度值的阈值。若电源在WireSense扫描过程中检测到高于此阈值的值,则表明已检测到板材的边缘,且TPS/i会立即输出数字触碰信号和确定的高度值。基于上述操作,机器人掌握了板材边缘的所在位置及其高度。
边缘检测:修正机器人路径
机器人控制器可利用该信号保存其当前位置数据,并通过将之与目标数据进行比较,来修正机器人路径。如此一来,任何工件误差均会得到可靠识别并予以补偿。然后,机器人将在正确的位置执行焊接操作。边缘检测已可以应用于厚度在0.5mm到20mm的材料。
高度测量:尽管存在工差间隙,仍能可靠焊接
由于还可通过数字触碰信号传输精确测量的板材边缘高度值,所以WireSense可计算出板材之间的工差间隙。假设已预先指定好相关程序,则可根据各类工差间隙的需求,调用存储在TPS/i中的各种焊接程序或Job。由此,机器人能够做出适当的响应,并以适合于所述工差间隙尺寸的理想焊接参数进行焊接。
因此,WireSense有助于消除焊接工件的公差波动,并抵消夹紧技术中的公差。辅助系统可保证可靠的焊缝质量,并在无需任何额外传感器硬件的情况下,降低高达100%的返工率与工件报废率。为此,伏能士焊接系统仅需配备适用于CMT的系统,便可确保对焊丝的高精度控制。
通过TeachMode执行快速的机器人编程操作
在焊接开始之前,须对机器人路径进行手动编程–我们称其为示教过程。示教过程包括由焊工或编程人员运用示教器控制机器人、扫描工件并保存位置数据。就焊缝质量而言,尤其重要的是在整个焊缝上保持工件和导电嘴之间距离的恒定–我们称其为干伸长。辅助系统还可助您完成这项较为耗时的手动过程。
伏能士推出的TeachMode运用焊丝回抽运动来防止焊丝在扫描工件时发生弯曲。只要未达到预设的干伸长,机器人便会执行焊丝回抽运动。同时,系统将利用视觉/听觉信号通知使用者,此时使用者须将焊枪从工件件上移开。这样用户就不必去拆卸变形的焊丝或重新测量干伸长,从而使示教过程加速30%。
SeamTracking:焊接过程中的焊缝追踪
伏能士SeamTracking辅助系统能够在铁路或工程车辆的制造中发挥非常重要的作用。当焊接厚板材或长焊缝时,产生的热量会导致工件变形或定位不准。为确保机器人焊接位置的准确性,需要在焊接过程中运用一种可靠系统来检测焊接位置。SeamTracking系统仅对角焊缝和经过制备的对接焊缝进行跟踪,且无需任何额外的传感器硬件。
为此,机器人会于焊接过程中在两块板材之间来回移动。机器人将测得的实际值应用于各项焊接参数,以检测实际焊接位置或任何偏差。预编程路径会自动修正,且机器人会于正确位置执行可靠的焊接操作。
运用TouchSense检测角焊缝位置
为补偿工件和夹紧公差,机器人可于每次焊接前利用TouchSense自动检查角焊缝的位置。为此,机器人在定义的焊缝起点和末端处,利用带有低传感器电压的焊丝或气体喷嘴来碰触两块板材。可通过短路中所包含的信号来确定最佳起始点。
凭借基于焊丝的辅助系统节约成本
总而言之,伏能士机器人辅助系统可助您实现更加高效而可靠的机器人焊接过程。由于机器人可以自行修正焊缝路径,显著降低工件返工率,并减少对机器人路径进行后续编程所花费的时间和精力,所有这些优势都为您极大降低了巨额的生产成本费用。凭借伏能士辅助系统,焊丝可兼作传感器和填充金属。这为用户节省了保养传感器硬件的资金与时间,且不会以任何方式限制工件的可达性。
图片说明:
图1:伏能士开发的全新机器人焊接辅助系统可将焊丝转变为传感器。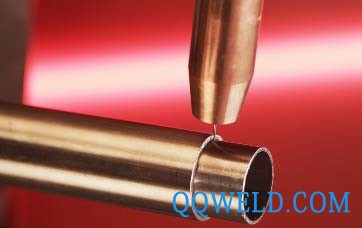
图2:凭借WireSense技术,焊丝可扫描工件并检测板材和管道的边缘位置及高度。
图3:RobactaDriveCMT驱动装置的高动态及精确焊丝运动使得借助焊丝扫描工件变为现实。
图4:WireSense可与伏能士推出的任何配备了CMT焊接工艺硬件的TPS/i焊接系统搭配使用。
图5:伏能士推出的TeachMode可助用户对机器人路径进行编程,并使整个过程变得更为高效。
机器人焊接辅助系统:支持自动化批量生产
2020-08-21 来源:中国焊接协会 |责任编辑:小球球 浏览数:1388 全球焊接网
核心提示:自动焊接,完全自主,无瑕焊缝–这是我们的愿景。工差间隙、夹紧公差和其他缺陷即将成为过去,或由机器人焊接系统进行自动补偿。这在某些方面可能仍有很长的路要走,但是许多机器人辅助系统已在帮助减少自动化批量生
打赏
0 条相关评论
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 全自动焊接流水线
全自动焊接流水线 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 Ehave
Ehave 焊接机器人
焊接机器人 JQ·YD407气保护堆焊耐磨药芯焊丝
JQ·YD407气保护堆焊耐磨药芯焊丝 WS7-500(IGBT)氩弧焊机直流焊机供应
WS7-500(IGBT)氩弧焊机直流焊机供应 锂离子电池和锂电池的区别
锂离子电池和锂电池的区别 辉腾KT 5 滚轮架 可调式焊接滚轮架 组合滚轮架
辉腾KT 5 滚轮架 可调式焊接滚轮架 组合滚轮架 上海华东ZX7-250小型家用带数显直流电焊机逆变手工焊机2
上海华东ZX7-250小型家用带数显直流电焊机逆变手工焊机2 DLC系列激光打标控制卡DLC2PCIE-QCW-24V
DLC系列激光打标控制卡DLC2PCIE-QCW-24V 优势供应cronitex焊条--赫尔纳大连
优势供应cronitex焊条--赫尔纳大连版权与免责声明:
注明稿件来源的内容均为自动转载信息、企业用户或网友注册发布,本网转载出于传递更多信息的目的;如转载信息涉及版权问题,请及时联系网站客服,我们将第一时间对相关内容进行删除处理。同时对于资讯内容及用户评论等信息,本网并不表示赞同其观点或证实其内容的真实性;亦不承担任何法律责任。
本文地址:http://www.qqweld.com/news/show-2992.html
转载本站原创文章请注明来源:全球焊接网 或原稿来源。









