
ABB机器人RAPID指令中,通过转弯半径zonedata来定义机器人是否精确到达某个点或者提早拐弯。

2. 例如以下语句表示机器人到达目标点P20的100mm的范围内,开始向下一个位置拐弯
MoveL P10,v200,z100,tWeldGunWObj:=wobj0;
MoveL P20,v200,z100,tWeldGunWObj:=wobj0;
MoveL P30,v200,z100,tWeldGunWObj:=wobj0;
3. 在Robotstudio中,可以可视化的展示各区域数据,方便前期判断轨迹,例如下图为z100效果

4.在创建完轨迹后,右击对应轨迹,“查看”-“显示各区域”,则可以看到当前轨迹的zonedata效果。

5. 也可以批量修改zonedata数据,选择需要调整的轨迹,右击,“修改指令”-“区域”,选择区域


上图显示z10转弯半径效果
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 全自动焊接流水线
全自动焊接流水线 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 Ehave
Ehave OTC气保焊机-日本进口焊机销售公司
OTC气保焊机-日本进口焊机销售公司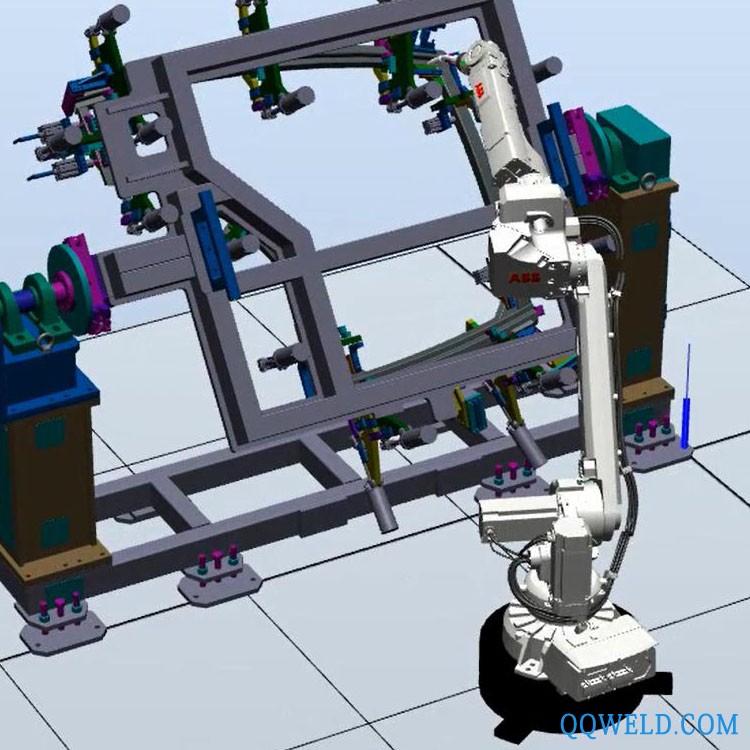 山东焊接机器人 焊接机械手专业生产厂家
山东焊接机器人 焊接机械手专业生产厂家 焊机机器人生产厂家焊接机器人价格自动焊机机器人松下焊接机器人自动焊接设备工业机器人弧焊机器人焊接机器人控制系统
焊机机器人生产厂家焊接机器人价格自动焊机机器人松下焊接机器人自动焊接设备工业机器人弧焊机器人焊接机器人控制系统 数控自动焊接机器人 五轴焊接机器人 六轴焊接机器人 全自动数控国内工业焊接机器人
数控自动焊接机器人 五轴焊接机器人 六轴焊接机器人 全自动数控国内工业焊接机器人 厂家直销 电焊机BX1-500A
厂家直销 电焊机BX1-500A 洁净暖通管管焊接机器人
洁净暖通管管焊接机器人 生产加厚冲孔网板 穿孔板工厂
生产加厚冲孔网板 穿孔板工厂 供应 越达 双立柱变位机
供应 越达 双立柱变位机








