
听说,在江湖中流传着一句话“机器人不如机器狗,两条腿的不如四条腿”。
自从波士顿动力的spot机器狗开发以来,我们发现四足机器人或者说机器狗能做的事情是越来越多了,行走跑跳、爬坡、翻跟头,样样不在话下。
“那两条腿的机器人真的不如四条腿的吗?”小编不仅发出了疑问。
今天,小编想带大家看看这款人形双足机器人——PRIMER。
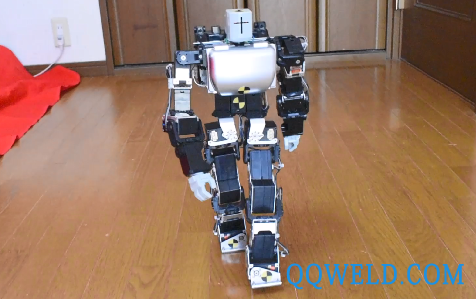
别看它一脸严肃,其实是个芭蕾舞爱好者。
旋转跳跃我不停歇。
洋娃娃当舞伴,交际舞也行。
除了跳舞,杂耍也是一绝。
走钢丝:

倒立:
骑自行车去“上班”:

看我一记脚刹:

PRIMER-V7
PRIMER系列机器人是日本机器人专家Guero博士开发的。我们看到的骑自行车机器人是PRIMER系列在2011年的早期版本PRIMER-V2,正是它让Guero博士名气大涨。
最近,PRIMER系列迎来了它的最新版本——PRIMER-V7。
PRIMER-V7展现了优美的芭蕾舞旋转舞姿和稳稳当当的从直立到倒立的过程。芭蕾旋转技术通过尖角转弯检查机器人的复杂运动和平衡控制。它结合了精细控制,例如调节手臂的摆动以保持转速恒定等。

关于倒立运动,Guero博士展示了PRIMER-V7从倒立运动开始到着陆的过程,倒立的任务需要智能处理,因为不仅要立即控制平衡,还要考虑如何选择和优化从无数模式转换到目标状态的操作。

PRIMER-V7的机械组成是以Kondo KHR-3HV机器人套件为基础的,Kondo官网上可以以大约1800美元的价格买到,大约一万二人民币。

机器人配有17个可串行连接的KRS-2552RHV伺服机构,它是全金属齿轮规格,通过滚珠轴承支撑输出轴,表现出最大的耐用性和出色的强度。PRIMER-V7的腿部采用了独特的链接方式,可摆脱复杂的引线处理,从而获得整洁的外观。可以防止由于引线布线不正确而引起的故障,并提高了可靠性。

PRIMER-V7将伺服机构放置在上臂和下臂,髋关节和腰部,从一开始就设置了需要添加的虚拟轴。通过附加的伺服器,可以升级到轴扩展规格,例如转动腰部来跳芭蕾舞。
从V2-V7,PRIMER系列机器人经历了什么
回顾PRIMER系列的发展历程,从2011年到现在,足足有9年的历史。
从名声大振的PRIMER-V2讲起,小小的机器人外形不足30厘米,骑车的动作相当销魂。

为了跟踪PRIMER-V2的倾斜并进行校正以防止跌落,Guero博士制作了自己的控制板,带有SH7125 CPU内核,并将Tamagawa Seiki TAG201陀螺仪集成到设计中。使用比例积分微分控制器(PID)控制机器人的平衡动作,PID可用于计算车架倾斜时车把转向多远。
随后,Guero博士开发了PRIMER-V3和V4,在平衡性能上增进了一步。
PRIMER-V3可以在4毫米宽的独木桥上单脚站立,同时能将重物悬在手臂和腿上。
PRIMER-V4则是彻头彻尾的走钢丝杂耍艺术家。机器人脚上有额外的凹槽,凹槽可以穿过钢丝,从而使机器人沿着钢丝滑动,并通过上下舞动手臂来保持平衡。Guero博士在其网站上解释说,机器人的手臂可以根据其倾斜传感器发出的信号向不同的方向移动。
平衡能力达到了,然而PRIMER作为一个双足机器人并没有开始正儿八经的在走路。于是,PRIMER-V5出现了,并以膝盖弯曲伸展的方式开始像人一样行走。
PRIMER-V6将应用场景放在了碎石路和沙地上,在复杂地面上,由于仅靠控制腿部很难保持平衡,因此PRIMER-V6也使用了挥手作为辅助。

Guero博士是何许人也
Guero博士的本名其实叫山口正彦,山口大叔的这个昵称是由他的妻子取的,据说他的妻子是《龙珠》的忠实拥护者,认为山口大叔不帮忙做家务,每天只绕着机器人转,就像《龙珠》里执着又邪恶的天才机器人发明家Guero博士。

如果你看过《龙珠》这部动漫,那一定知道孙悟空的死对头——那个干瘪的老头Guero博士,身着夹克,头上带有印着红缎带军团R的黑帽。

山口大叔曾在一些著名实验室工作,例如日本国立先进工业科学技术研究院,波士顿动力和大阪大学。目前山口大叔致力于研究人工智能双足机器人,然而PRIMER系列是否真正达到人工智能水平,这一点还存疑。
PRIMER-V7还未公布更多细节,但之前的几代机器人都是人为遥控的,而并不是自主控制的。山口大叔也承认,小型双足人形机器人还具有一些局限性,例如机器人中使用的伺服器的特性起着很大的作用;难以从运动中计算出精确的公差水平;难以处理快速运动(如动态步行)的机械运动的计算等。
两条腿的机器人VS四条腿的机器狗,你更看好哪个呢?
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 全自动焊接流水线
全自动焊接流水线 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 Ehave
Ehave 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 美国SMC INCONEL 82 焊丝
美国SMC INCONEL 82 焊丝 PANASONIC/松下 松下双脉冲气保焊机YD-350GL5不锈钢MIG,不锈钢MIG脉冲焊接机
PANASONIC/松下 松下双脉冲气保焊机YD-350GL5不锈钢MIG,不锈钢MIG脉冲焊接机 氩弧焊管道半自动焊机
氩弧焊管道半自动焊机 大型激光切割机,激光切割机 山东激光切割机 节省人力
大型激光切割机,激光切割机 山东激光切割机 节省人力 久保田300A直流柴油氩弧焊机-纤维素焊条
久保田300A直流柴油氩弧焊机-纤维素焊条 JBN-不锈钢放料阀
JBN-不锈钢放料阀 明行 小型变位机 10公斤变位机
明行 小型变位机 10公斤变位机 山东激光切割机 大功率激光切割机厂家
山东激光切割机 大功率激光切割机厂家








