
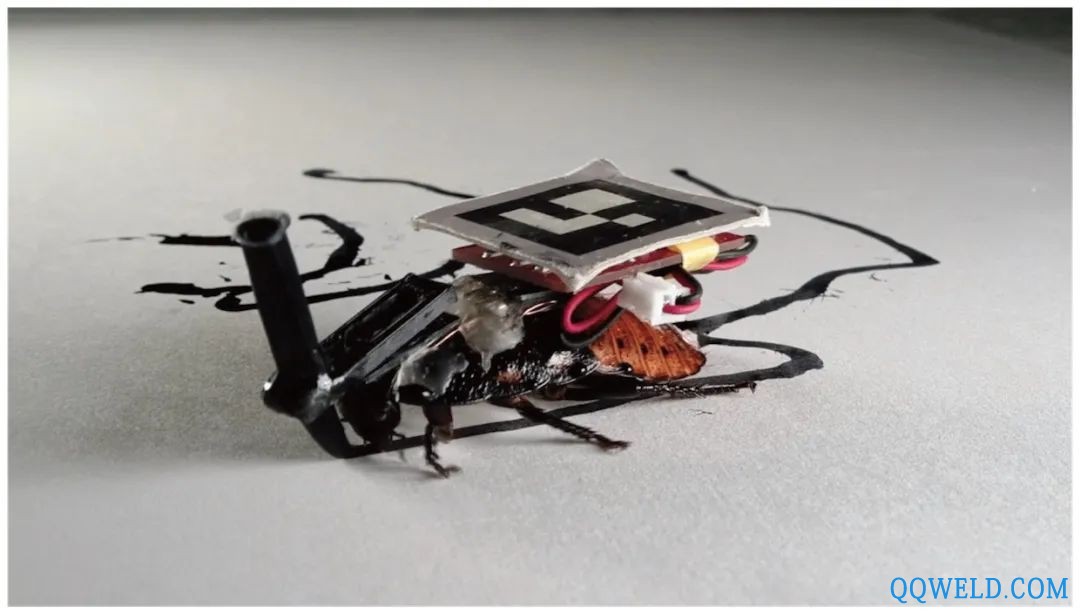
 远程控制蟑螂并不是一个新想法,但确是一个相当简单的想法。通过刺激蟑螂的左或右触角神经,你可以让它以为它撞上了什么东西,然后让它转向相反的方向。通过无线连接,一些基准点标记,一个头部摄像头系统,和一堆机器人蟑螂 -- 你就有了一个弹性可控的机器人群体,可以协作完成任务啦。 研究人员说,这些电子机器人可以在家里搬运物品,在纸上画东西,或许有一天它们还能充当“输入、触觉接口或音频设备”。 通过移植,这些蟑螂被植入电脑部件,研究人员还将一些部件粘在昆虫的外表上。当它变成半机械昆虫后,研究小组测试了用电缆控制它穿过墙壁、地毯和地板的能力。研究人员在一份声明中说:“我们为蟑螂设计了可选的部件,使它们能够画线和移动物体。” “当出现失控的蟑螂时,我们会使用替代蟑螂来继续执行正在进行的任务。”然而,与其他成群的机器人蟑螂不同,这些机器人蟑螂被设计成由一种特殊的算法控制,可以让单个昆虫处理可能给其他蟑螂带来的错误,并完成其他蟑螂无法完成的任务。 虽然本文章的主题是蟑螂机器人,但该项目的负责人Yuga Tsukuda还开发了一些其他研究。如以下视频对您造成伤害,请关闭。这是一个蟑螂驱动的时钟,研究人员注意到“当试图通过电刺激控制蟑螂时,很难控制它们,因为它们会自发地移动。然而,通过切断头部和移除大脑,它们不会自动移动,计算机的控制变得很容易。 另外,研究人员将这个项目描述为“试图用蟑螂在脸上化妆(attempt to use cockroaches for makeup by sticking them on the face)”,他们将电极插入蟑螂体内,让蟑螂在受到电刺激时摆动双腿。而孔雀羽毛呢?它们可以“使蟑螂的活动范围更大,创造了一个宇宙的奥秘。”
远程控制蟑螂并不是一个新想法,但确是一个相当简单的想法。通过刺激蟑螂的左或右触角神经,你可以让它以为它撞上了什么东西,然后让它转向相反的方向。通过无线连接,一些基准点标记,一个头部摄像头系统,和一堆机器人蟑螂 -- 你就有了一个弹性可控的机器人群体,可以协作完成任务啦。 研究人员说,这些电子机器人可以在家里搬运物品,在纸上画东西,或许有一天它们还能充当“输入、触觉接口或音频设备”。 通过移植,这些蟑螂被植入电脑部件,研究人员还将一些部件粘在昆虫的外表上。当它变成半机械昆虫后,研究小组测试了用电缆控制它穿过墙壁、地毯和地板的能力。研究人员在一份声明中说:“我们为蟑螂设计了可选的部件,使它们能够画线和移动物体。” “当出现失控的蟑螂时,我们会使用替代蟑螂来继续执行正在进行的任务。”然而,与其他成群的机器人蟑螂不同,这些机器人蟑螂被设计成由一种特殊的算法控制,可以让单个昆虫处理可能给其他蟑螂带来的错误,并完成其他蟑螂无法完成的任务。 虽然本文章的主题是蟑螂机器人,但该项目的负责人Yuga Tsukuda还开发了一些其他研究。如以下视频对您造成伤害,请关闭。这是一个蟑螂驱动的时钟,研究人员注意到“当试图通过电刺激控制蟑螂时,很难控制它们,因为它们会自发地移动。然而,通过切断头部和移除大脑,它们不会自动移动,计算机的控制变得很容易。 另外,研究人员将这个项目描述为“试图用蟑螂在脸上化妆(attempt to use cockroaches for makeup by sticking them on the face)”,他们将电极插入蟑螂体内,让蟑螂在受到电刺激时摆动双腿。而孔雀羽毛呢?它们可以“使蟑螂的活动范围更大,创造了一个宇宙的奥秘。”筑波大学的一个数字自然研究小组(Digital Nature Group)正朝着一个“由计算资源和非计算资源无缝结合而成的后普适计算时代(post ubiquitous computing era)”而努力。所谓“非计算资源”指的是利用自然世界的资源,无论好坏,包括昆虫。 日本研究人员设想,在未来,成群的机器人蟑螂会在屋内自由走动,执行各种各样的小任务。 远程控制蟑螂并不是一个新想法,但确是一个相当简单的想法。通过刺激蟑螂的左或右触角神经,你可以让它以为它撞上了什么东西,然后让它转向相反的方向。通过无线连接,一些基准点标记,一个头部摄像头系统,和一堆机器人蟑螂 -- 你就有了一个弹性可控的机器人群体,可以协作完成任务啦。 研究人员说,这些电子机器人可以在家里搬运物品,在纸上画东西,或许有一天它们还能充当“输入、触觉接口或音频设备”。 通过移植,这些蟑螂被植入电脑部件,研究人员还将一些部件粘在昆虫的外表上。当它变成半机械昆虫后,研究小组测试了用电缆控制它穿过墙壁、地毯和地板的能力。研究人员在一份声明中说:“我们为蟑螂设计了可选的部件,使它们能够画线和移动物体。” “当出现失控的蟑螂时,我们会使用替代蟑螂来继续执行正在进行的任务。”然而,与其他成群的机器人蟑螂不同,这些机器人蟑螂被设计成由一种特殊的算法控制,可以让单个昆虫处理可能给其他蟑螂带来的错误,并完成其他蟑螂无法完成的任务。 虽然本文章的主题是蟑螂机器人,但该项目的负责人Yuga Tsukuda还开发了一些其他研究。如以下视频对您造成伤害,请关闭。这是一个蟑螂驱动的时钟,研究人员注意到“当试图通过电刺激控制蟑螂时,很难控制它们,因为它们会自发地移动。然而,通过切断头部和移除大脑,它们不会自动移动,计算机的控制变得很容易。 另外,研究人员将这个项目描述为“试图用蟑螂在脸上化妆(attempt to use cockroaches for makeup by sticking them on the face)”,他们将电极插入蟑螂体内,让蟑螂在受到电刺激时摆动双腿。而孔雀羽毛呢?它们可以“使蟑螂的活动范围更大,创造了一个宇宙的奥秘。”
远程控制蟑螂并不是一个新想法,但确是一个相当简单的想法。通过刺激蟑螂的左或右触角神经,你可以让它以为它撞上了什么东西,然后让它转向相反的方向。通过无线连接,一些基准点标记,一个头部摄像头系统,和一堆机器人蟑螂 -- 你就有了一个弹性可控的机器人群体,可以协作完成任务啦。 研究人员说,这些电子机器人可以在家里搬运物品,在纸上画东西,或许有一天它们还能充当“输入、触觉接口或音频设备”。 通过移植,这些蟑螂被植入电脑部件,研究人员还将一些部件粘在昆虫的外表上。当它变成半机械昆虫后,研究小组测试了用电缆控制它穿过墙壁、地毯和地板的能力。研究人员在一份声明中说:“我们为蟑螂设计了可选的部件,使它们能够画线和移动物体。” “当出现失控的蟑螂时,我们会使用替代蟑螂来继续执行正在进行的任务。”然而,与其他成群的机器人蟑螂不同,这些机器人蟑螂被设计成由一种特殊的算法控制,可以让单个昆虫处理可能给其他蟑螂带来的错误,并完成其他蟑螂无法完成的任务。 虽然本文章的主题是蟑螂机器人,但该项目的负责人Yuga Tsukuda还开发了一些其他研究。如以下视频对您造成伤害,请关闭。这是一个蟑螂驱动的时钟,研究人员注意到“当试图通过电刺激控制蟑螂时,很难控制它们,因为它们会自发地移动。然而,通过切断头部和移除大脑,它们不会自动移动,计算机的控制变得很容易。 另外,研究人员将这个项目描述为“试图用蟑螂在脸上化妆(attempt to use cockroaches for makeup by sticking them on the face)”,他们将电极插入蟑螂体内,让蟑螂在受到电刺激时摆动双腿。而孔雀羽毛呢?它们可以“使蟑螂的活动范围更大,创造了一个宇宙的奥秘。” 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 全自动焊接流水线
全自动焊接流水线 Ehave
Ehave 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 欢颜 HY1006A-138焊接机器人 北欧高品质焊机 ,价格优惠,节约成本,高效焊接 欢颜机器人
欢颜 HY1006A-138焊接机器人 北欧高品质焊机 ,价格优惠,节约成本,高效焊接 欢颜机器人 ZYHC-20-30-40焊条烘干保温两用箱厂家 焊条烘干保温两用箱价格 焊条烘干保温两用箱参数
ZYHC-20-30-40焊条烘干保温两用箱厂家 焊条烘干保温两用箱价格 焊条烘干保温两用箱参数 凯尔达KE-500S气保/手工/气刨多用焊机
凯尔达KE-500S气保/手工/气刨多用焊机 供应辉腾ZHB-02焊接变位机
供应辉腾ZHB-02焊接变位机 直销 自动焊接机器人 4轴5轴焊接机械手臂
直销 自动焊接机器人 4轴5轴焊接机械手臂 博山水泵经常发生哪些故障?厂家来帮您解答
博山水泵经常发生哪些故障?厂家来帮您解答 瑞凌东升氩弧焊机 WS-200小型便携式逆变直流手工电焊/氩弧焊机
瑞凌东升氩弧焊机 WS-200小型便携式逆变直流手工电焊/氩弧焊机 减速机 涡轮减速机厂家 蜗轮蜗杆WPA变速箱 微型小型减速器滚轮架减速箱
减速机 涡轮减速机厂家 蜗轮蜗杆WPA变速箱 微型小型减速器滚轮架减速箱








