

研究人员能够将其3D打印传感器(如图所示)集成到多个软机器人设备中。
图片来自《科学机器人》杂志。 使软机器人更加敏感 为了使机器人系统与环境和人类更具交互性,科学家已经进行了大量研究。最初,这些研究集中在能够对输入(例如电阻或光强度)做出相应的传感器上,但是许多传感器一次只能检测一种变形模式。 尽管微流体和织物设备在这一领域已显示出希望,但它们只能区分一个传感元件,因此无法区分不同类型。考虑到单个刺激可以引起多个变形响应,因此仍然非常需要创建一种更具适应性的软传感器。 已经采取了多种方法来创建多模式机器人,包括将流体通道或传感元件嵌入弹性体结构中。然而,将传感器物理地组合成一个结构经常影响它们的尺寸,并增加了设计和制造过程的复杂性。
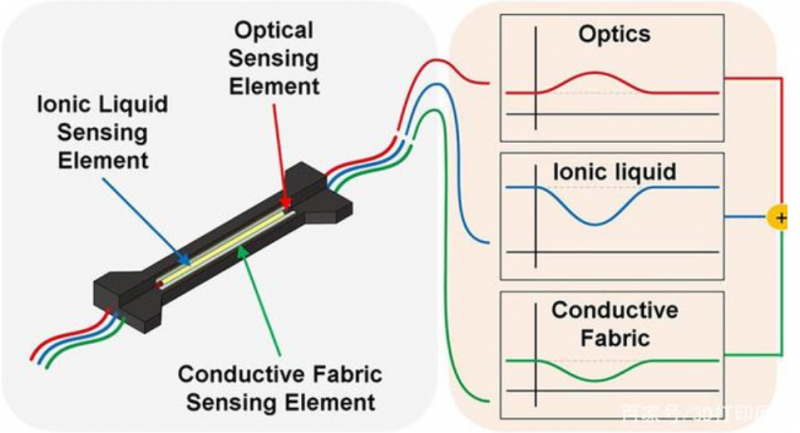
使用3D打印,科学家们能够将三个不同的传感元件集成到一个设备中(如图所示)。
图片来自《科学机器人》杂志。 团队的新型多模式传感器 为了克服先前项目的局限性,团队3D打印了一个多功能传感器,该传感器能够检测单个变形模式并立即将它们全部解耦。该设备本身具有微流体通道,该通道中充满了离子液体,弹性外壳和导电织物层。 从理论上讲,当团队的设计发生变形时,其通道将充当传感器并改变其电阻。为了将其付诸实践,研究人员将他们的设备置于不同的力下,并在模拟过程中部署了机器学习技术以测量其多峰能力。 在施加局部接触压力之前,将传感器从旋转接头的中性轴弯曲,以模拟拉伸,压缩和弯曲。结果表明,设备信号的灵敏度随施加压力的位置而变化,表明它可能对外部刺激产生反应。 为了证明他们的传感器在人机界面中的潜力,科学家构建了两个原型系统。一种是可穿戴设备,使用户能够精确控制无人机和机械臂,而另一种则是由四个执行器组成的软机器人“手腕”,可以对外力产生反作用。 尽管该团队承认需要进行进一步的测试以消除手动生产步骤,但与其他设计相比,他们认为自己的设备是向前迈出的重要一步。未来,科学家们相信他们的传感器可以应用于大型机器人中,从而为他们提供多达十种不同的传感功能。 软机器人技术的进步 研究人员正越来越多地采用3D打印技术,以制造具有更复杂设计和高级功能(从感觉到走路到“出汗”)的软机器人。 来自浙江工业大学,天津大学,南京理工大学和立命馆大学的科学家已经开发出3D打印的软机器人手指。该团队生产了他们的加法数字,以证明可以采用多种材料制造来简化机器人生产过程。 同时,康奈尔大学的研究人员用3D打印了一条柔软的机器人肌肉,该肌肉可以通过汗水控制内部温度。柔软的手指状致动器可以使不受束缚的机器人长时间运行而不会过热。 在其他地方,加利福尼亚大学圣地亚哥分校的一个团队已部署增材制造,以生产步行昆虫启发的机器人。 精打细算的机器人旨在降低寻求进入该领域的爱好者和研究人员的进入成本。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 Ehave
Ehave 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 全自动焊接流水线
全自动焊接流水线 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 ABB IRB-2400 焊接机器人 机器人 变位机
ABB IRB-2400 焊接机器人 机器人 变位机 没错 我们专业生产机器人焊接臂 爱国焊接机器人
没错 我们专业生产机器人焊接臂 爱国焊接机器人 H1440系列氩弧焊机全自动氩弧焊机
H1440系列氩弧焊机全自动氩弧焊机 脉冲氩弧焊机 WSE-315LD/315MD/500HD 逆变式交直流脉冲氩弧焊机 氩弧焊机 直流氩弧焊机
脉冲氩弧焊机 WSE-315LD/315MD/500HD 逆变式交直流脉冲氩弧焊机 氩弧焊机 直流氩弧焊机 供应滚轮架外观设计、结构设计、产品设计、工业设计、创意设计、配色设计
供应滚轮架外观设计、结构设计、产品设计、工业设计、创意设计、配色设计 ..沧州辉腾供应滚轮架. KT20T 防腐滚轮架 焊接滚轮架 喷漆滚轮架 可以定做
..沧州辉腾供应滚轮架. KT20T 防腐滚轮架 焊接滚轮架 喷漆滚轮架 可以定做 金桥焊条 J506碳钢焊条 电焊条
金桥焊条 J506碳钢焊条 电焊条 辉腾 自调滚轮架 自调5吨滚轮架 自调10吨滚轮架 自调15吨滚轮架
辉腾 自调滚轮架 自调5吨滚轮架 自调10吨滚轮架 自调15吨滚轮架








