
1. 需要机器人有pcinterface和multitask选项
2. 创建虚拟信号

3. 将di_start和do_stop关联到系统输入
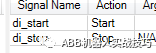
4. 创建crossconnection
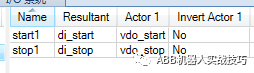
5. 新建任务t2,类型设为normal,以便能编程测试
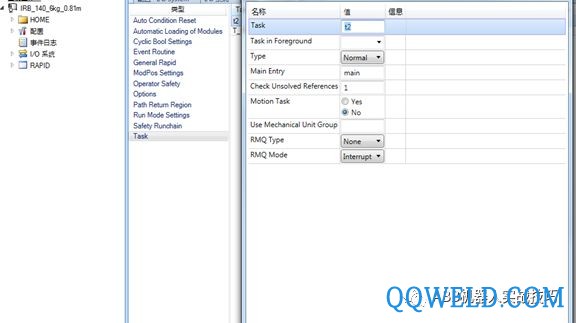
6. 在t2任务下新建模块,实质就是后台socket收发,当ABB机器人处于自动模式,收到start字符串,发送一个vdo_start脉冲信号,vdo_start关联到di_start信号,di_start信号关联到系统输入start上。Stop功能类似。
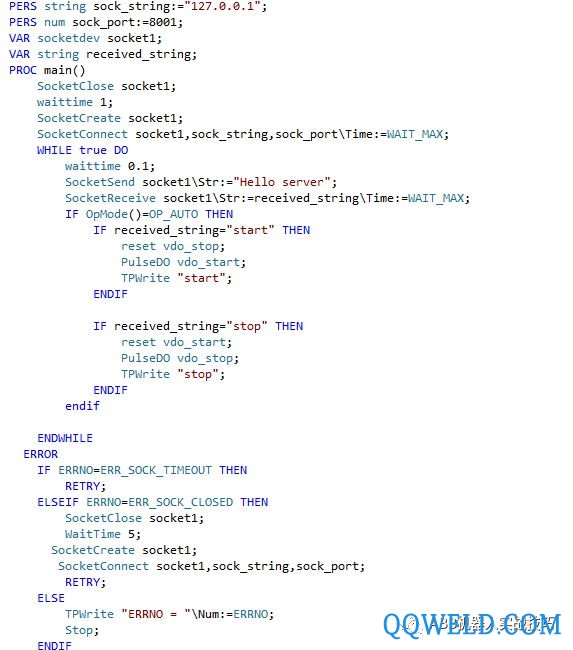
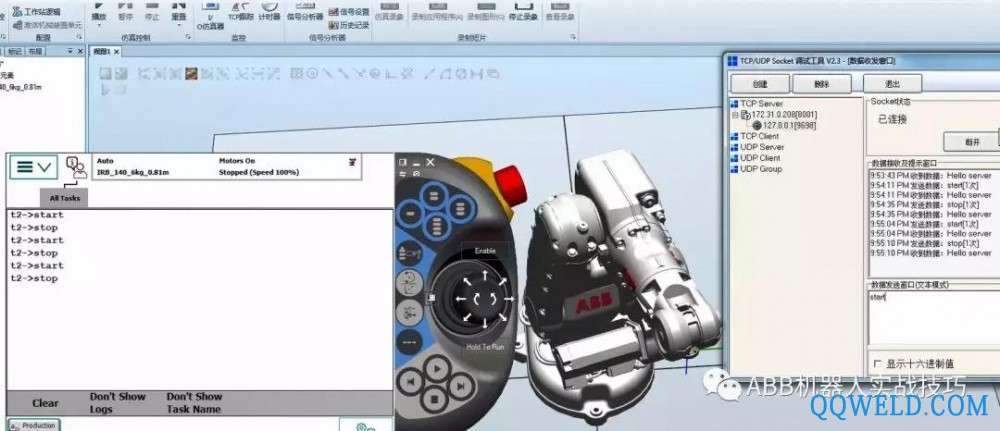
7. 测试完毕,将t2任务设为semistatic,即开机直接启动
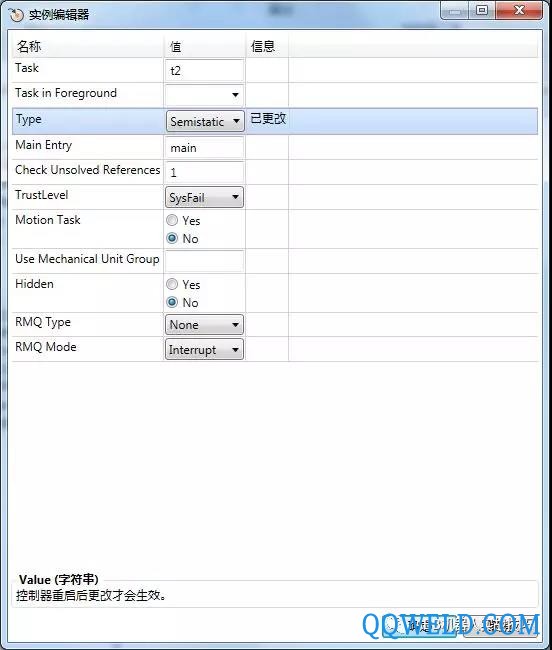
8. 重启后,打开socket测试小软件,如果机器人处于自动模式且上电,小软件发送start,机器人启动,发送stop,机器人停止。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 全自动焊接流水线
全自动焊接流水线 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 Ehave
Ehave KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 美国SMC超合金 镍 Nickel 141焊条
美国SMC超合金 镍 Nickel 141焊条 尼佳WSME-500交直流氩弧焊机 铝焊氩弧焊机电焊多功能焊机 铝合金不锈钢焊机 脉冲铝焊机 铝焊机厂家直销
尼佳WSME-500交直流氩弧焊机 铝焊氩弧焊机电焊多功能焊机 铝合金不锈钢焊机 脉冲铝焊机 铝焊机厂家直销![] 氯化钙干燥剂 环保干燥剂高吸湿干燥剂1g江门惠源包装供应](http://www.qqweld.com/file/upload/202604/14/094151442549.jpg.middle.jpg) ] 氯化钙干燥剂 环保干燥剂高吸湿干燥剂1g江门惠源包装供应
] 氯化钙干燥剂 环保干燥剂高吸湿干燥剂1g江门惠源包装供应 管道精密变位机 管道焊接变位机 法兰焊接变位机
管道精密变位机 管道焊接变位机 法兰焊接变位机 直流电焊机,直流电焊机介绍,直流电焊机厂家直销
直流电焊机,直流电焊机介绍,直流电焊机厂家直销 光纤激光切割机 工业光纤激光切割设备 光纤激光切割机厂家
光纤激光切割机 工业光纤激光切割设备 光纤激光切割机厂家 上海沪工WS-250K便携电焊机逆变直流手工家用电焊机氩弧焊机220v
上海沪工WS-250K便携电焊机逆变直流手工家用电焊机氩弧焊机220v 湘潭市 KUKA 码垛机器人 搬运机器人 焊接机器人
湘潭市 KUKA 码垛机器人 搬运机器人 焊接机器人








