
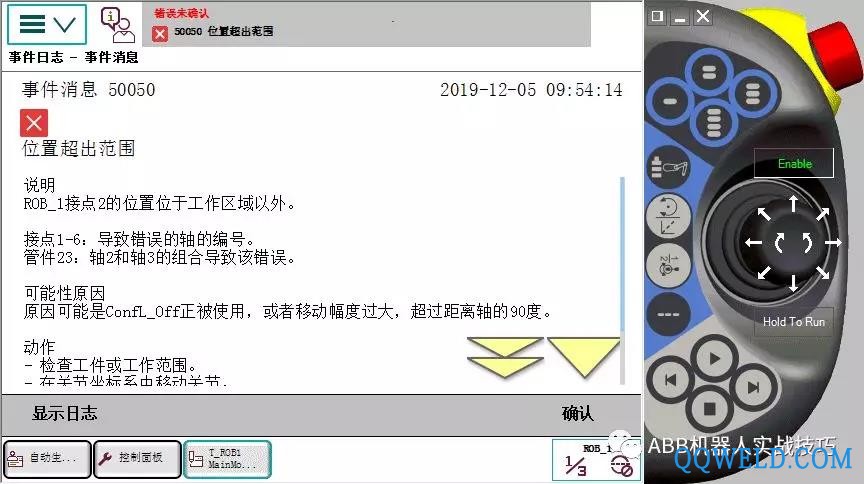
1. 机器人在运行MoveL p100,v1000,z50,tool0WObj:=wobj0;等语句时,若机器人走不到该位置p100,会出现上述报错。
2. p100为robtarget类型数据,即记录的是xyz等数据。
3. 该数据若非示教,而是通过计算或者外部相机拍照发送得到,有时就会发生机器人不可达。
4. 此时只有机器人运行到该行代码时,机器人报警并停机。
5. 是否可以提早对p100进行运算,检测机器人是否可达?
6. 可以使用函数CalcJoint函数,该函数返回p100在tool0下对应的各轴数据
jpos10:=CalcJointT(p100,tool0ErrorNumber:=myerrnum);
7. 增加ErrorNumber可选参数,此时若计算出的位置机器人不可达,则会得到报警代码ERR_ROBLIMIT(单轴超限)或者ERR_OUTSIDE_REACH(机器人不可达),后续对该错误代码处理即可。此时机器人不会停机。
8. 代码如下:
jpos10:=CalcJointT(Home20,tool0ErrorNumber:=myerrnum);
IF myerrnum=ERR_OUTSIDE_REACH THEN
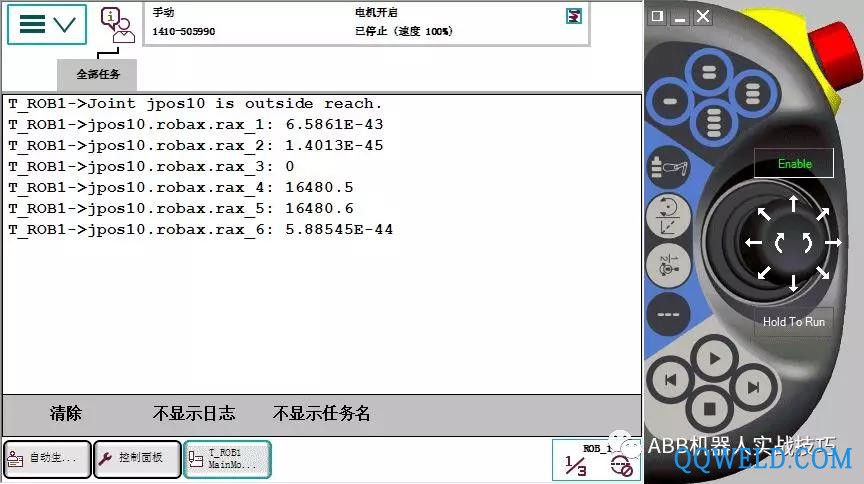
TPWrite "Joint jpos10 is outside reach.";
TPWrite "jpos10.robax.rax_1: "+ValToStr(jpos10.robax.rax_1);
TPWrite "jpos10.robax.rax_2: "+ValToStr(jpos10.robax.rax_2);
TPWrite "jpos10.robax.rax_3: "+ValToStr(jpos10.robax.rax_3);
TPWrite "jpos10.robax.rax_4: "+ValToStr(jpos10.robax.rax_4);
TPWrite "jpos10.robax.rax_5: "+ValToStr(jpos10.robax.rax_5);
TPWrite "jpos10.robax.rax_6: "+ValToStr(jpos10.robax.rax_6);
ENDIF
9. 假设此时Home20位置的x为10000,机器人完全不可达,则输出结果如下:
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 全自动焊接流水线
全自动焊接流水线 Ehave
Ehave 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 HW190型液压电焊机 消防液压电焊机 液压发电电焊机 厂家
HW190型液压电焊机 消防液压电焊机 液压发电电焊机 厂家 湖南 二手库卡工业机器人 焊接机器人
湖南 二手库卡工业机器人 焊接机器人 立源ZT/KT 焊接滚轮架
立源ZT/KT 焊接滚轮架 华荣WS-250A 逆变直流氩弧焊机 手工氩弧两用焊机 家用
华荣WS-250A 逆变直流氩弧焊机 手工氩弧两用焊机 家用 小型家用柴油发电电焊机 全成3kw5千瓦8kw电焊两用柴油发电机组
小型家用柴油发电电焊机 全成3kw5千瓦8kw电焊两用柴油发电机组 管道自动焊机 管道预制 不锈钢法兰圆管自动焊 焊接机器人 欢迎来电咨询
管道自动焊机 管道预制 不锈钢法兰圆管自动焊 焊接机器人 欢迎来电咨询 3LC-4.5/25 3LC-6/15 空压机配件
3LC-4.5/25 3LC-6/15 空压机配件 耐酸泵是什么材质的?
耐酸泵是什么材质的?








