
1. 函数ReadMotor(1)返回的是当前机器人1轴的电机总角度(单位弧度),即当前电机编码器值+圈数*2π。由于机器人使用单圈绝对值编码器,所以返回的也就是电机运动一圈内的值,用弧度表示,范围0~2π。
2. ABB机器人的电机旋转圈数由SMB板进行存储(控制柜开机时控制柜供电;控制柜关机时,SMB上的电池供电)。通常机器人出现的“转数计数器未更新”,即由于电池等原因导致圈数丢失。
3. 如何获取当前机器人的电机圈数(smb存储的圈数)及当前电机单圈反馈值?
4. ReadMotor=resolver_data+count*2*π
5. 根据以上公式,对ReadMotor/2π取整,即为圈数,余数即为当前编码器单圈反馈值。
6. 插入以下代码
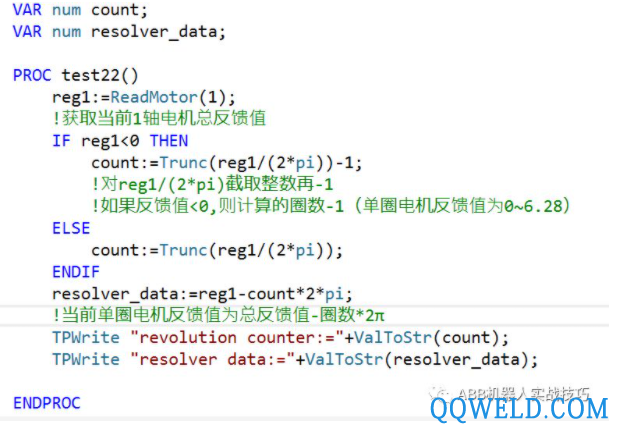
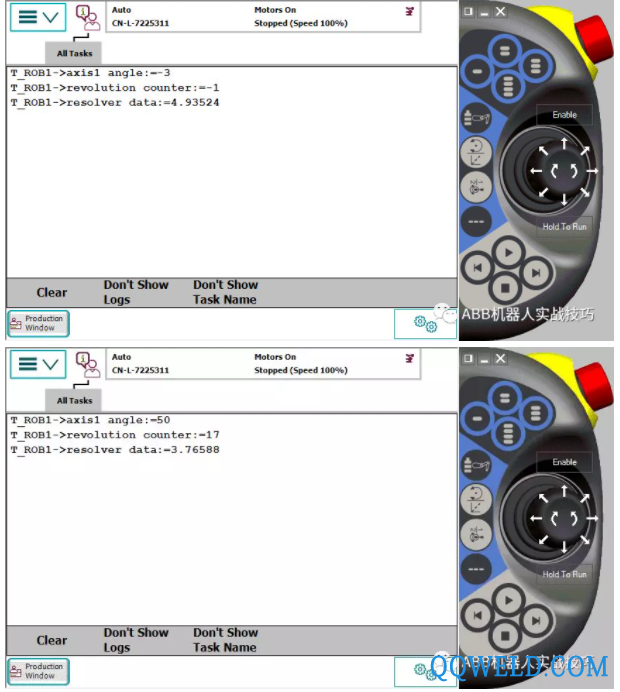
7. 运行以后可以得到结果,测试机器人在-3°,50°时的圈数和单圈值,结果如下。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 全自动焊接流水线
全自动焊接流水线 Ehave
Ehave 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 贵池手动焊接变位机 otc变位机
贵池手动焊接变位机 otc变位机 库卡焊接机器人
库卡焊接机器人 派克Parker-MGV系列高转速伺服电机
派克Parker-MGV系列高转速伺服电机 浩创瑞凌ZX7-250BG家用电焊机双电压自动转换220V/380V
浩创瑞凌ZX7-250BG家用电焊机双电压自动转换220V/380V 焊机 氩弧焊 直流焊 焊钳 面罩 手提小型家用 户外焊机 好
焊机 氩弧焊 直流焊 焊钳 面罩 手提小型家用 户外焊机 好 聚英环保|分体式布袋除尘器袋式除尘设备脉冲除尘器
聚英环保|分体式布袋除尘器袋式除尘设备脉冲除尘器 山东奥太焊机重庆总代理奥太直流焊机气保焊机
山东奥太焊机重庆总代理奥太直流焊机气保焊机 松下350气保焊枪欧式350焊枪气保焊机焊枪350二保焊枪
松下350气保焊枪欧式350焊枪气保焊机焊枪350二保焊枪








