
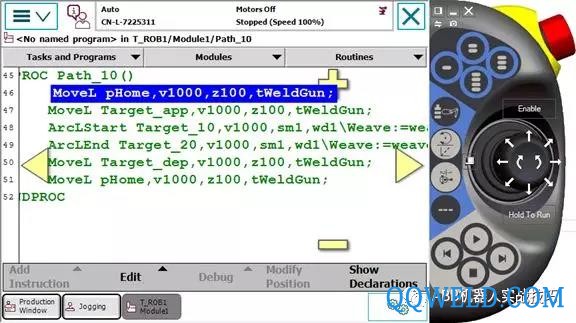
1)建程序的时候,所有点均在wobj0坐标系下(wobj0坐标系也可不写),如下图
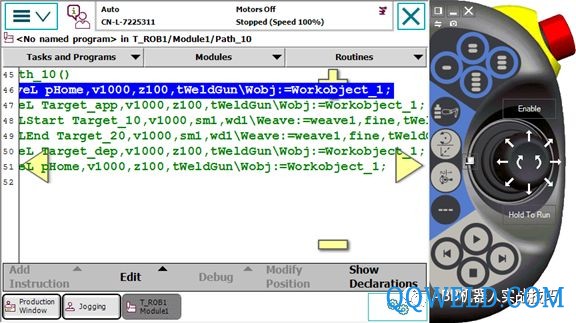
2)如果现在对工件做了工件坐标系,想把上述点转化到工件坐标系,并且批量修改所有运动指令,使得指令后自动带上对应的工件坐标系,如下图,如何实现?
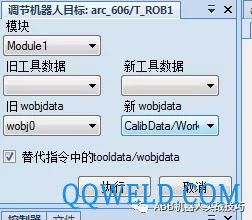
3)打开robotstudio,RAPIDtab下的调节机器人目标

4)选择模块,旧wobjdata和新wobjdata,如果勾选替代指令中的tooldata/wobjdata,则会把运动指令里对应的wobjdata更换,如果不勾选,只重算点
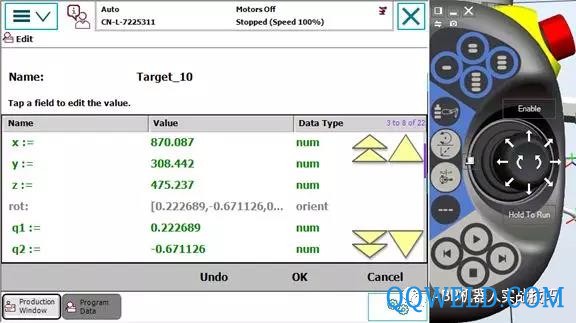
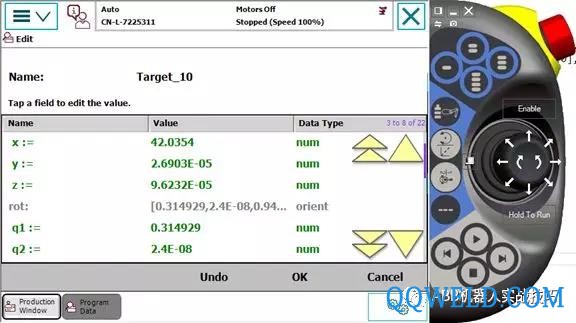
5)执行后,可以查看对应点位数据,发生变化
上图为在wobj0下
上图为workobject_1下
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 Ehave
Ehave 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 全自动焊接流水线
全自动焊接流水线 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 西安 YASKAWA/安川 MA2010 焊接机器人 变位机
西安 YASKAWA/安川 MA2010 焊接机器人 变位机 直销PP焊条,聚丙稀焊条 焊条厂家 焊条批发
直销PP焊条,聚丙稀焊条 焊条厂家 焊条批发 供应狮力多种型号家用水槽台面焊机 洗物盆台面焊机 缝焊机 电焊切割机械设备
供应狮力多种型号家用水槽台面焊机 洗物盆台面焊机 缝焊机 电焊切割机械设备 优质 ZT焊接滚轮架 现货 ZT焊接滚轮架 沧州辉腾管道装备
优质 ZT焊接滚轮架 现货 ZT焊接滚轮架 沧州辉腾管道装备 机器人铝合金围栏 焊接机器人防护围栏 焊接机器人围栏 机器人防护围栏 焊接机器人防护门,高藤焊接安全房Gtsafe-13
机器人铝合金围栏 焊接机器人防护围栏 焊接机器人围栏 机器人防护围栏 焊接机器人防护门,高藤焊接安全房Gtsafe-13 长沙市 YASKAWA/安川 MA2010 焊接机器人 工业机器人 氩弧焊机器人
长沙市 YASKAWA/安川 MA2010 焊接机器人 工业机器人 氩弧焊机器人 耐热钢焊条 德国蒂森焊条 E9018-B3焊条 镍基合金焊条
耐热钢焊条 德国蒂森焊条 E9018-B3焊条 镍基合金焊条 铜焊条 斯米克铜焊条 T107铜焊条 管焊接铜焊条
铜焊条 斯米克铜焊条 T107铜焊条 管焊接铜焊条








