
11.5.1 移动类型
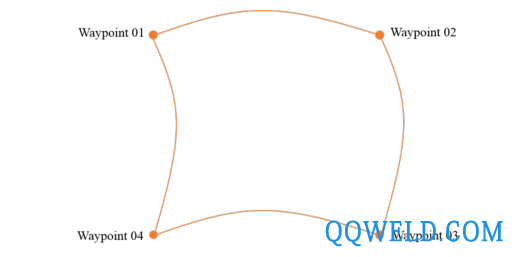
轴动运动
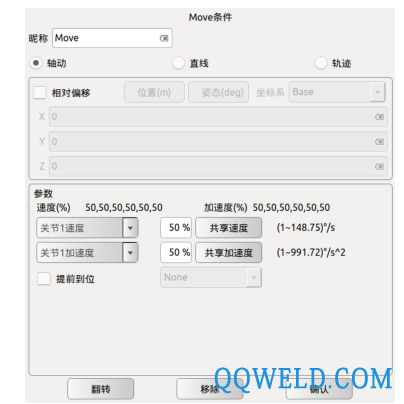
图 11-13 轴动运动
根据路点间的各个关节的运行角度,根据设定的电机的最大速度和最大加速度(六个机械臂的公共参数)限制,各个关节以最快的速度同步到达目标的路点(始末速度均为零)。运行过程中,可通过轨迹显示功能观察机械臂末端运行轨迹。如果希望机器人手臂在路点之间快速移动,而不用考虑 TCP 在这些路点之间的移动路径,
此移动类型是个不错的选择。轴动运动适用于在空间足够的环境下,用最快的方式移动。
运动方式如下图所示。
关节最大速度和加速度:
➢ 最大电机运动速度为 3000rpm,建议用户实际使用时最大不超过 2800rpm,最大电机运动加速度(即每秒增加的电机速度)为 20000rpm/s。
➢ 机器人关节速度为电机速度/转速比。AUBO-i3 的 Joint 1 ~ 6 的转速比为 101。
➢ 关节运行中可分别设置关节 1-关节 6 的关节最大角速度和最大角加速度百分比,点击共享按钮可将速度或加速度复制到其他关节处。
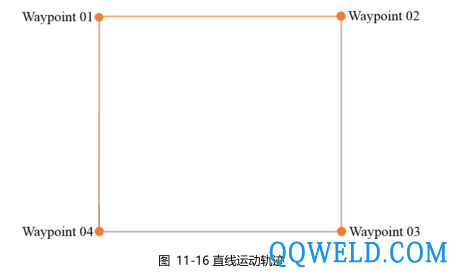
直线运动

图 11-15 直线运动
将使工具中心点在路点之间进行线性移动。这意味着每个关节都会执行更为复杂的移动,以使工具保持在直线路径上。适用于此移动类型的共用参数包括所需工具最大速度和工具最大加速度(分别以 mm/s 和 mm/s 2 表示)和运动模式。与轴动运动类似,工具速度能否达到和保持最大速度取决于直线位移和最大加速度参数。运
动方式如下图所示。
轨迹运动
多个路点的轨迹运动,运行过程中相应的关节空间或笛卡尔空间运行速度、加速度连续,始末路点速度为零。目前支持 Arc(圆弧)、Cir(圆周)、moveP(直线轨迹的圆弧平滑过渡)、B_Spline(B 样条曲线)四种模式。编写轨迹运动时,Arc 与 Cir运动 Move 条件下有且只能有三个路点,MoveP 与 B_Spline 运动 Move 条件下需要至少三个路点(理论上没有上限),且需要在该命令前插入一个轴动 Move 命令,此 Move 命令下的节点需与轨迹运动的第一个路点一致。
注意:如需使用带有姿态的圆弧运动(arcwithorirot)及带有姿态的圆周运动(cirwithorirot),机械臂 6 关节需支持±360°旋转,具体信息请联系您的供货商。
圆弧运动
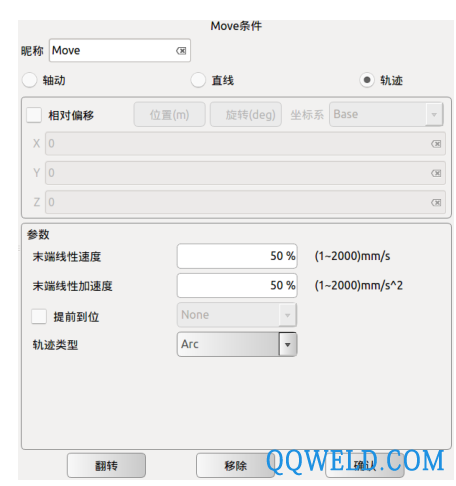
图 11-17 圆弧运动
三点法确定圆弧,并按照顺序进行从起始路点运动至结束路点,属于笛卡尔空间轨迹规划。姿态变化仅受始末点影响。最大速度和加速度意义同直线运动。轨迹类型选择 Arc 时,为圆弧运动。
圆周运动
与圆弧运动相似,三点法确定整圆轨迹及运动方向,完成整个圆周运动后回到起点。
运动过程中保持起始点姿态不变。最大速度和加速度意义同直线运动。参数类型选择 Cir 时,为圆周运动,右侧文本输入框可输入圆周循环的次数。
moveP
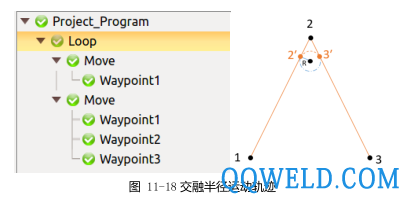
直线轨迹的圆弧平滑过渡(moveP):相邻两段直线用设置的交融半径处用圆弧平滑过渡,运行过程中的姿态变化仅受始末点影响。最大速度和加速度意义同直线运动。
moveP 为多个直线轨迹间的圆弧平滑过渡,交融半径的运行特点为连续运动且不会在该路点停止。交融半径值越小,路径的转角越大,反之,交融半径值越大,路径的转角越小。
示例
插入两个 move 并设置如下所示(1),(1,2,3)三个路点,第一个 move 为关节运动,第二个 move 为 moveP 运动,运行程序后 moveP 如下图所示轨迹运行(1-2′-3′-3)。
B 样条
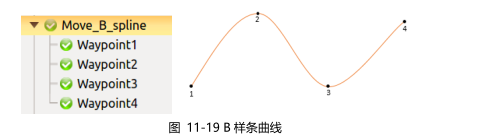
B 样条曲线(B_Spline):根据给定的路径点拟合出一条路径曲线。生成拟合曲线所使用的路点越多,拟合出的曲线离预期越接近。B 样条曲线为一条平滑经过所有给定路点的曲线,需注意曲线的始末点不能闭合。
示例
插入一个 move 并设置如下所示(1,2,3,4)四个路点,运行程序后 B 样条曲线
如下图所示轨迹运行
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 Ehave
Ehave 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 全自动焊接流水线
全自动焊接流水线 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 2mm孔径防护洞洞板 圆孔板
2mm孔径防护洞洞板 圆孔板 OTC FD-B4 二手工业机器人 自动焊接机器人
OTC FD-B4 二手工业机器人 自动焊接机器人 瑞凌东升 便携式电焊机 电子电焊机 交流电焊机
瑞凌东升 便携式电焊机 电子电焊机 交流电焊机 SAVEST全钢气瓶柜厂 带报警双瓶气瓶柜定制商 上海晋名
SAVEST全钢气瓶柜厂 带报警双瓶气瓶柜定制商 上海晋名 排焊 自带氩弧焊发电焊机 自带氩弧焊发电焊机榆林
排焊 自带氩弧焊发电焊机 自带氩弧焊发电焊机榆林 飞速fsh光纤激光切割机 精密激光切割机 激光切割机
飞速fsh光纤激光切割机 精密激光切割机 激光切割机 【值得购买】焊接滚轮架/可调式30吨滚轮架/苏州无锡滚轮架
【值得购买】焊接滚轮架/可调式30吨滚轮架/苏州无锡滚轮架 OTCFD-V6L自动焊接机器人
OTCFD-V6L自动焊接机器人








