
11.10.2 定时器状态显示
菜单栏选择在线编程,工具栏选择状态-定时器,可查看定时器状态显示。
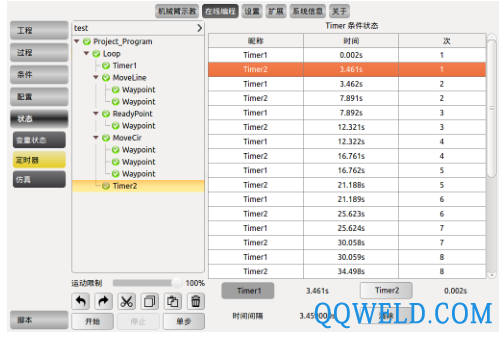
➢ 昵称对应工程文件中的命令名称。
➢ 时间为程序起始点运行到此 Timer 命令时所用的时间。
➢ 次表示此条 Timer 命令在程序文件中执行的次数。
➢ Timer1 及 Timer2 为选中某条 Timer 命令时,显示的对应时间。
➢ 时间间隔为选中的 Timer 距离上一个选中 Timer 的时间间隔。
➢ 注意:timer1 与 timer2 的显示与点击列表中的条件名称顺序有关系,以按钮显示灰色为准,与 time 名称的显示顺序没有关系。
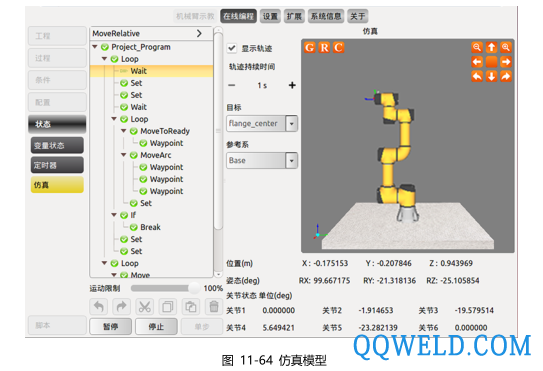
11.11 仿真模型
仿真模型是仿真选项卡,点击启动运行一个程序时,会自动切换到仿真模型选项卡。
界面主要包括两个部分,界面中部是 3D 仿真窗口,界面下部是机器人运动参数。
此时示教器界面其它界面被锁定,如下图,用户只能对机器人进行暂停、停止和观测机器人日志操作。
3D 仿真窗口中有机器人 3D 模型,模型会根据程序动作,模型的动作和真实机器人是一致的。
用户可勾选显示轨迹,在仿真窗口中即可看见末端的运动轨迹,还可通过设置轨迹持续时间,来规定轨迹显示的时间。
界面下部可根据选择目标及参考系动态显示机器人运动参数,包括:位置参数 XYZ,姿态参数:RX RY RZ。
目标下拉菜单提供选择显示位姿的目标是法兰盘重心(默认)或指定的 tool 末端功能。用户可以通过 10.4.2 工具标定章节来新增加下拉菜单工具选项。
参考系下拉菜单表示目标所参照的坐标系,用户可通过 10.4.3 坐标系标定章节来增加下拉菜单坐标系选项。
位置参数中的 XYZ 表示工具法兰中心点(选定的工具坐标系)在选定坐标系(基坐标系、末端坐标系、用户自定义坐标系)下的坐标。
姿态参数中的 RX、RY、RZ 表示相对于选定坐标系旋转的角度值,是以一定顺序绕选定坐标系旋转三次得到的方位的描述。
表示基座平面,点击可隐藏仿真界面中的基座参考平面
表示实际路点模型,点击可隐藏
表示用户坐标系,点击可隐藏
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 全自动焊接流水线
全自动焊接流水线 Ehave
Ehave 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 米勒250分体交直流氩弧焊机 进口米勒焊机维修 模具铝焊接设备 氩弧焊机维修 米勒氩弧焊机
米勒250分体交直流氩弧焊机 进口米勒焊机维修 模具铝焊接设备 氩弧焊机维修 米勒氩弧焊机 厂家直销【贯通智维】激光切割机 激光切割机厂家 质量保证
厂家直销【贯通智维】激光切割机 激光切割机厂家 质量保证 供应博塔重工BHB10吨变位机
供应博塔重工BHB10吨变位机 FD-V6LOTC焊接机器人系统,OTC焊接机,数字节能环保焊机
FD-V6LOTC焊接机器人系统,OTC焊接机,数字节能环保焊机 怀化焊接机器人 长沙焊接机器人
怀化焊接机器人 长沙焊接机器人 哈利斯焊条规格45
哈利斯焊条规格45 广州烽火WSE-250可控硅交直流方波脉冲氩弧焊机
广州烽火WSE-250可控硅交直流方波脉冲氩弧焊机 博塔倾斜、升降特殊滚轮架
博塔倾斜、升降特殊滚轮架








