
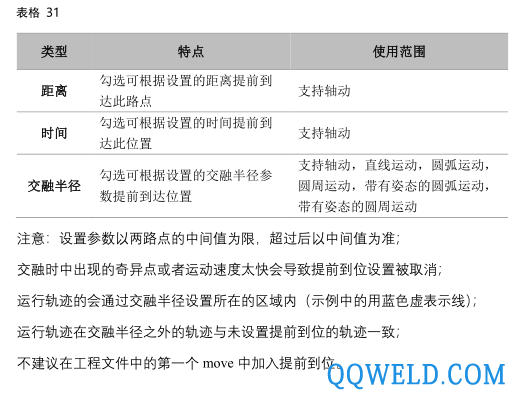
11.5.3 提前到达
按照距离目标的位置、时间或者交融半径选择提前到达,可以用以提高机械臂工作效率。
提前到达会依据用户设置的距离或者时间以及交融半径进行运行轨迹的调整,用以提高机械臂工作效率,因此会出现不经过某一个或多个设定路点的情况。勾选提前到位按键可以通过选择按照距离目标位置或者距离目标位置时间提前到达。勾选此项 Move 命令下的 waypoint 会依据用户设置的距离或者时间进行运行轨迹的调整,用以提高机械臂工作效率,因此会出现不经过某一个或多个 waypoint设定路点的情况。
通过勾选提前到位,选择按照距离目标位置,距离目标位置时间以及交融半径提前到达,用以提高机械臂工作效率。
提前到达会依据用户设置的距离或者时间以及交融半径进行运行轨迹的调整,用以提高机械臂工作效率,因此会出现不经过某一个或多个设定路点的情况。
11.6 基础条件命令
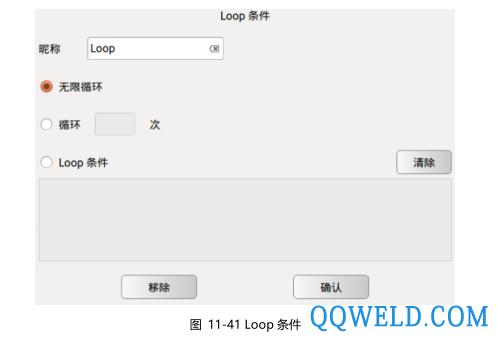
11.6.1 循环命令Loop
Loop 命令可以可用于连续多次重复的程序代码。需要重复的程序代码放在循环命令中。loop 命令可以配置为无限重复,特定次数,或表达式为真(例如变量或输入信号)。
➢ Loop 是循环命令,Loop 节点包含的程序会循环运行,直到终止条件成立。
➢ 点击昵称右侧空白口会弹出输入框,可修改命令名称。
➢ 选择无限循环可实现程序无限循环。
➢ 选择循环__次设置循环次数,到达次数后退出循环。
➢ 选择 loop 条件设置循环条件表达式,表达式成立时进入循环,表达式不成立时退出循环。点击清除清空表达式。
➢ 点击确定确认此命令状态配置,并保存。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 Ehave
Ehave KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 全自动焊接流水线
全自动焊接流水线 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 中坚直销小型家用逆变直流电焊机ZX7-250 IGBT单板焊
中坚直销小型家用逆变直流电焊机ZX7-250 IGBT单板焊 铭丰高原蒸饭柜价格
铭丰高原蒸饭柜价格 不锈钢二级单表减压器
不锈钢二级单表减压器 建筑材料岩棉净化复合板生产厂家规格定制
建筑材料岩棉净化复合板生产厂家规格定制 TST-2机器人 焊接工作站,TST焊接机器人 TST 焊接工房
TST-2机器人 焊接工作站,TST焊接机器人 TST 焊接工房 科弧PM238 不用气的二保焊机 无气自保护焊机
科弧PM238 不用气的二保焊机 无气自保护焊机 瑞凌东升RL-D1电焊机氩弧焊机改冷焊机 氩弧焊精密脉冲控制器 仿激光焊机
瑞凌东升RL-D1电焊机氩弧焊机改冷焊机 氩弧焊精密脉冲控制器 仿激光焊机 焊接机器人 管道自动焊接 览众MIG350便携式机器人
焊接机器人 管道自动焊接 览众MIG350便携式机器人








