
在这机器人“与人共融”的快速发展期
想要提高协作机器人的性价比
让国内有需求的中小企业
都能快速用上机器人
集萃智造认为
主要可以从核心零件的自主研发着手
电机是协作机器人作业的原动力。在当前很多客户的实际应用中,协作机器人需要低速运行,比如实验室里的药物检测、焊接、服务场景的咖啡机器人等,这就对机器人控制的稳定性和精度有了更高要求。
目前,国内市场上的常见电机在低速运行时,控制稳定性和精度往往较差。所以针对电机零速启动时转子位置角定位难、输出力矩小等问题,集萃智造研发团队近期优化了具备霍尔位置传感器的无刷直流电机矢量控制启动策略,增强了协作机器人在负载较大场合下的启动能力,让电机启动更可靠。

霍尔位置估算原理
01、基于霍尔位置传感器的转速和转子位置估算方法,是建立在电机稳定运行且能够准确获取转速、位置等信息基础上的。通常情况下,将3个霍尔原件安装在空间相隔120°的圆周上,相对于每一相定子绕组超前30°或90°电角度。
以1对极电机为例:
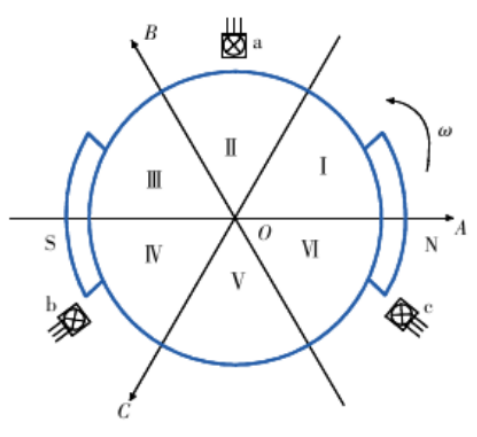
霍尔传感器超前90°安装的位置
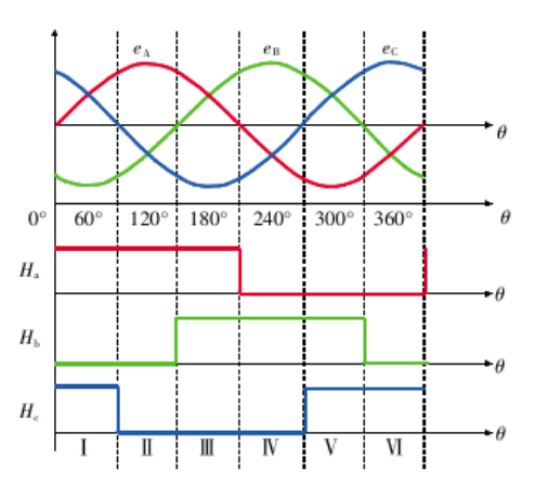
三相霍尔信号与反电势对应关系
电机启动时,根据霍尔位置传感器输出信号得到启动初始角位置,即转子所在当前霍尔扇区的中间位置,角度误差控制在±30°以内,然后根据给定转速与电流信息,执行SVPWM算法。电机转动后带动转子同轴上的光栅编码器,在事先完成光编Z信号绝对电角度标定的前提下,光栅旋转输出Z信号脉冲时完成电角度补偿,实现电机高效率、低转矩脉动运行,从而提高了机器人的运行稳定性及启动能力。
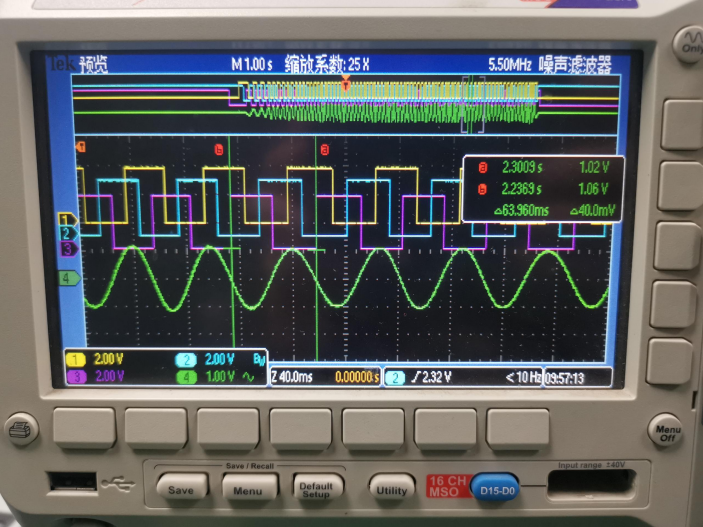
实测图
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 全自动焊接流水线
全自动焊接流水线 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 Ehave
Ehave 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 焊接变位机
焊接变位机 【易铁机电】江苏高精密金属激光切割机 金方圆切割机 优质激光切割机厂家
【易铁机电】江苏高精密金属激光切割机 金方圆切割机 优质激光切割机厂家 氩弧焊机 WSE-315LD/315MD/500HD 逆变式交直流脉冲氩弧焊机 氩弧焊机 直流氩弧焊机
氩弧焊机 WSE-315LD/315MD/500HD 逆变式交直流脉冲氩弧焊机 氩弧焊机 直流氩弧焊机 厂家批发机器人M-10IB发那科机器人机器人自动焊接机器人切割机器人钣金装备解决方案
厂家批发机器人M-10IB发那科机器人机器人自动焊接机器人切割机器人钣金装备解决方案 无锡谊诚焊割HB 焊接变位机
无锡谊诚焊割HB 焊接变位机 国产定制六轴焊接机器人 认准AEQUOR/爱国
国产定制六轴焊接机器人 认准AEQUOR/爱国 供应二手米勒氩弧焊机二手美国米勒氩弧焊机
供应二手米勒氩弧焊机二手美国米勒氩弧焊机 长沙市 YASKAWA/安川 MA2010 焊接机器人 工业机器人 氩弧焊机器人
长沙市 YASKAWA/安川 MA2010 焊接机器人 工业机器人 氩弧焊机器人








