
Q1
背景
传统的电力变压器检测采用人工操作,工人将变压器搬到指定位置,完成接线端子的安装、固定、检测等操作。存在自动化程度低、工作量大、风险高、维修人员专业要求高等问题,不能满足日益增长的电力维修操作需求。
为达到“减员、增效、提质、保安全”目标是武汉海默机器人有限公司推出自动变压器性能测试系统,大大提高了电力变压器检测的灵活性和自动化程度。
Q2
设计方案
该系统以机器人为基础,采用3D相机获取环境数据,生成变压器三维点云模型。通过彩色图片信息和深度信息的集成,获得端子的组装位置和所需的检测位置,并将端子位置设置为目标位置点。通过轨迹规划算法实现自动避障,获得机器人末端的有效运动轨迹,并发送给机器人。机器人获得执行命令,并开始执行端子夹持性能测试操作。通过在国家电网测试现场的测试,该系统证明该系统可以取代测试人员进行无人操作。
此外,该系统还采用了智能AGV叉车系统,智能AGV叉车负责将变压器运输到固定的工装位置。叉车系统采用叉车系统。SLAM导航技术,无需提前设置地图和路径,即可实时构建导航地图。在自动变压器性能测试系统中,PLC系统与视觉系统,智能化AGV叉车系统、机器人等通信,实现整体控制。
Q3
结语
自动变压器性能测试系统解决了变压器端子人工检测工作量大的问题,提高了测试效率,大大提高了测试安全性。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 Ehave
Ehave 全自动焊接流水线
全自动焊接流水线 捷瑞特 十字氩弧焊枪 QQ300/150/500氩弧焊枪逆变电焊机氩弧切割枪土氩弧焊枪
捷瑞特 十字氩弧焊枪 QQ300/150/500氩弧焊枪逆变电焊机氩弧切割枪土氩弧焊枪 硬齿面减速机的通气器的主要作用
硬齿面减速机的通气器的主要作用 铝焊加工、氩弧焊加工、CO2保护焊加工冲孔设备 铝焊焊机诚信
铝焊加工、氩弧焊加工、CO2保护焊加工冲孔设备 铝焊焊机诚信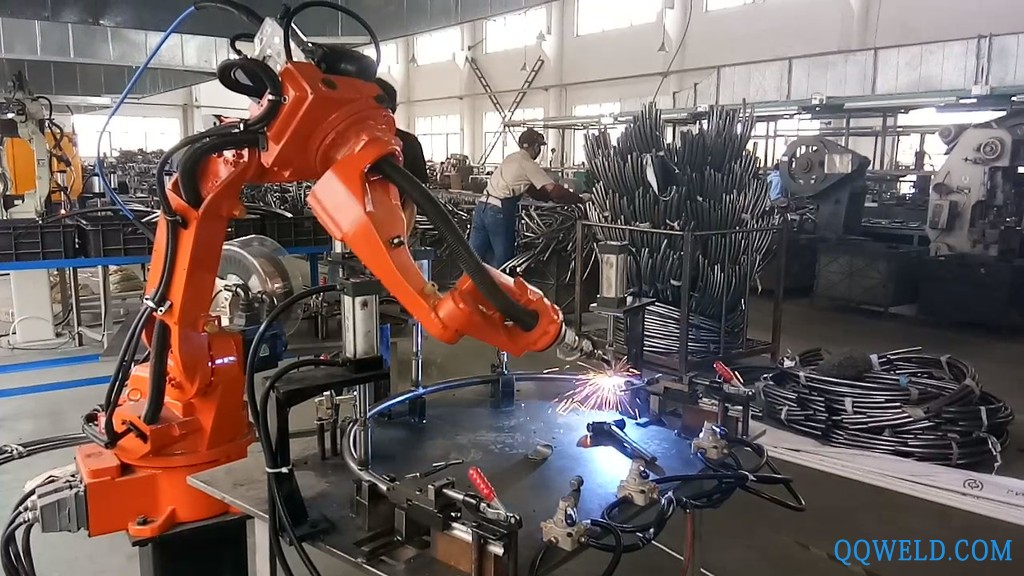 固锐童车焊接 农机零件焊接机器人 焊接机器人价格
固锐童车焊接 农机零件焊接机器人 焊接机器人价格 供应金属光纤激光切割机 切割设备厂家
供应金属光纤激光切割机 切割设备厂家 粘弹体防腐胶带薄厚不匀的原因
粘弹体防腐胶带薄厚不匀的原因 萧山15公斤和面机/萧山全钢和面机/萧山全钢和面机厂家
萧山15公斤和面机/萧山全钢和面机/萧山全钢和面机厂家 ZW-3/8 ZW-6/8 压缩机配件
ZW-3/8 ZW-6/8 压缩机配件








