
 四足机器人只能平衡两条腿,并可以脚跟走路。在数字仿真中,该控制器允许一个90公斤重的机器人跨过仅6厘米宽的桥梁。意大利技术研究所(IIT)的研究人员演示了配备有控制器的机器人如何即使在被推拉时也能保持两只脚的平衡。当机器人调整到不同的高度时,它甚至可以在两条腿上保持平衡。IIT小组在arXiv上的一篇论文中详细介绍了他们的发现。 在美国,波士顿动力公司的Spot可以说是最受欢迎的四足机器人,但是随着研究人员开发诸如IIT的机器人控制器,我们可能会看到更多的四足机器人应用。
四足机器人只能平衡两条腿,并可以脚跟走路。在数字仿真中,该控制器允许一个90公斤重的机器人跨过仅6厘米宽的桥梁。意大利技术研究所(IIT)的研究人员演示了配备有控制器的机器人如何即使在被推拉时也能保持两只脚的平衡。当机器人调整到不同的高度时,它甚至可以在两条腿上保持平衡。IIT小组在arXiv上的一篇论文中详细介绍了他们的发现。 在美国,波士顿动力公司的Spot可以说是最受欢迎的四足机器人,但是随着研究人员开发诸如IIT的机器人控制器,我们可能会看到更多的四足机器人应用。尽管四足机器人可以实现令人赞叹的壮举,例如拉飞机或爬栅栏,但它们仍然有一些局限性。在大多数情况下,它们需要较大的表面才能行走。意大利的一组机器人研究人员正在寻求改变这一现状。他们创建了一个机器人控制器,该控制器可以使四足机器人跨过细光束。
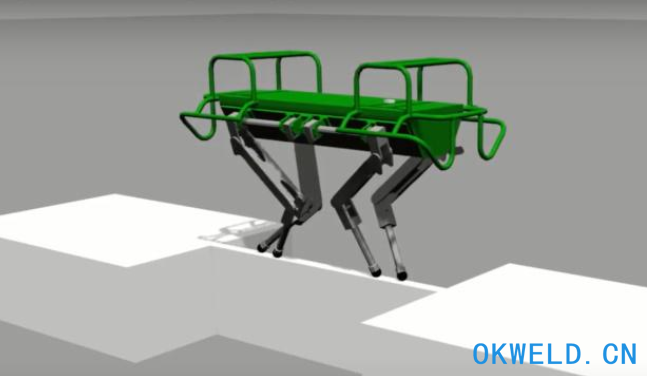
四足机器人只能平衡两条腿,并可以脚跟走路。在数字仿真中,该控制器允许一个90公斤重的机器人跨过仅6厘米宽的桥梁。意大利技术研究所(IIT)的研究人员演示了配备有控制器的机器人如何即使在被推拉时也能保持两只脚的平衡。当机器人调整到不同的高度时,它甚至可以在两条腿上保持平衡。IIT小组在arXiv上的一篇论文中详细介绍了他们的发现。 在美国,波士顿动力公司的Spot可以说是最受欢迎的四足机器人,但是随着研究人员开发诸如IIT的机器人控制器,我们可能会看到更多的四足机器人应用。
四足机器人只能平衡两条腿,并可以脚跟走路。在数字仿真中,该控制器允许一个90公斤重的机器人跨过仅6厘米宽的桥梁。意大利技术研究所(IIT)的研究人员演示了配备有控制器的机器人如何即使在被推拉时也能保持两只脚的平衡。当机器人调整到不同的高度时,它甚至可以在两条腿上保持平衡。IIT小组在arXiv上的一篇论文中详细介绍了他们的发现。 在美国,波士顿动力公司的Spot可以说是最受欢迎的四足机器人,但是随着研究人员开发诸如IIT的机器人控制器,我们可能会看到更多的四足机器人应用。 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 全自动焊接流水线
全自动焊接流水线 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 Ehave
Ehave 志圣双门电子元器件恒温干燥箱
志圣双门电子元器件恒温干燥箱 OTC焊机,OTC气保焊机,OTC全数字气保焊机,【OTC-
OTC焊机,OTC气保焊机,OTC全数字气保焊机,【OTC- 宿州安庆黄山阜阳ABB爱科思机器人发那科Fanuc安川库卡KUKA焊接机器人焊接机械手焊接自动化汽车焊接汽车焊接自动化
宿州安庆黄山阜阳ABB爱科思机器人发那科Fanuc安川库卡KUKA焊接机器人焊接机械手焊接自动化汽车焊接汽车焊接自动化 滚轮架、万象焊接、可调式焊接滚轮架、厂家直销滚轮架、可购可租滚轮架
滚轮架、万象焊接、可调式焊接滚轮架、厂家直销滚轮架、可购可租滚轮架 普耐尔ZX7250D-SV双电压电焊机220v380v直流电焊机两用家用焊机
普耐尔ZX7250D-SV双电压电焊机220v380v直流电焊机两用家用焊机 广东松下焊机维修 东莞焊机维修 焊机维修厂家 松下点焊机 松下碰焊机维修 松下二保焊机维修 松下氩弧焊机维修
广东松下焊机维修 东莞焊机维修 焊机维修厂家 松下点焊机 松下碰焊机维修 松下二保焊机维修 松下氩弧焊机维修 供应芬兰肯比XIM-350气保焊机
供应芬兰肯比XIM-350气保焊机 深圳佳士WSME-500(E312)交直氩弧焊机 2014新
深圳佳士WSME-500(E312)交直氩弧焊机 2014新








