
激光清洗扫描部件主要是振镜电机和极少数八面转镜,振镜电机负载反射镜用于往返偏摆激光光斑实现激光线扫描。激光光斑越大,反射镜尺寸越大,偏摆惯性越强,导致偏摆速度越慢。以Scanlab厂商 HurryScan系列产品而言,10mm光斑振镜扫描速度约为12m/s,20mm光斑扫描速度约为6m/s,30mm光斑扫描速度约为1.2m/s。激光功率越高,激光光斑越大,扫描速度越慢,而高效清洗要求激光功率高、扫描速度快,振镜无法满足高功率激光。同时,由于振镜电机往返偏转扫描,激光扫描到边缘区域减速到零后反向加速,导致激光光斑在边缘区域停留时间较长,激光热作用时间长,导致边缘过烧现象严重。因此,振镜电机在大功率激光清洗应用中有两个明显缺陷即扫描速度慢、边缘过烧严重。振镜电机更多用于低功率激光打标而非高功率清洗应用。

图1 八面转镜扫描示意图
八面转镜(也可其它数量面如六面转镜、四面转镜等)技术是借鉴上世纪国外过期专利,即在八棱镜的八个侧面各安装有一个反射镜,激光以一定入射角斜射入该棱镜侧面反射镜,入射光方向不变,棱镜沿中心发生自转。激光光斑在侧面反射镜镜面划过即入射激光相对侧面反射镜入射角发生变化,反射激光形成扫描。对于八面镜而言,激光扫描到相邻侧面反射镜之间棱线时需要关闭激光,等激光光斑完全进入到侧面反射镜后才能打开激光,否则侧面反射镜边缘会被打坏,时间长后整个反射镜会被打坏。激光光斑自身有一定尺寸,当激光光斑从侧面反射镜一端边缘滑到另一端边缘轨迹相对于八面镜中心的圆心角ɑ为该侧面反射镜实际出光角度,转动一周出光角度为8*ɑ,引入激光利用率 ,其中N为多面镜面数,这里N=8。如图1所示,当棱镜侧面反射镜尺寸为20*18mm时,激光从P1跑到P2时,该棱镜利用率为
,其中N为多面镜面数,这里N=8。如图1所示,当棱镜侧面反射镜尺寸为20*18mm时,激光从P1跑到P2时,该棱镜利用率为 。等效100W脉冲八面转镜清洗与63.8W脉冲振镜清洗效率相同,大功率脉冲激光清洗效率将更低。与此同时,由于边缘区域关闭激光,扫描到新的侧面反射镜边缘时打开激光,激光从关闭到打开瞬间会出现首脉冲效应,导致激光边缘过烧问题依旧出现。八面转镜应用于大功率激光清洗中两个明显缺陷是激光利用率低,边缘过烧问题依旧存在。八面转镜多用于雷达扫描,雷达激光功率低,棱线相交区域可不用关闭激光。
。等效100W脉冲八面转镜清洗与63.8W脉冲振镜清洗效率相同,大功率脉冲激光清洗效率将更低。与此同时,由于边缘区域关闭激光,扫描到新的侧面反射镜边缘时打开激光,激光从关闭到打开瞬间会出现首脉冲效应,导致激光边缘过烧问题依旧出现。八面转镜应用于大功率激光清洗中两个明显缺陷是激光利用率低,边缘过烧问题依旧存在。八面转镜多用于雷达扫描,雷达激光功率低,棱线相交区域可不用关闭激光。
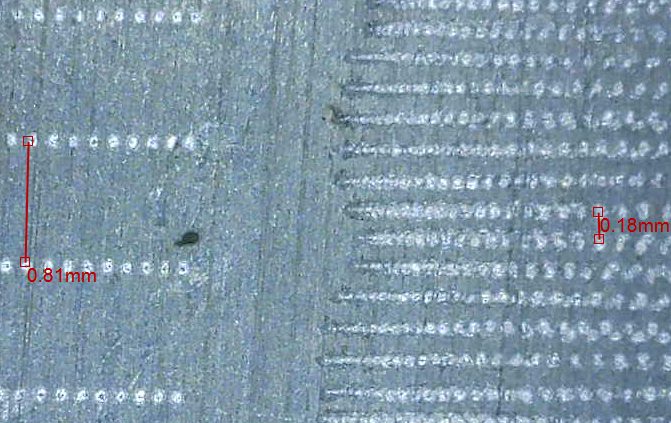
图2 左:振镜系统扫描图 右:MASM系统扫描图
针对扫描速度慢、边缘过烧清洗问题,江苏大学表界面科学与技术研究所耗时5年成功开发出高速多阵列扫描系统MASM(Multi-Array Scan Mirror),该系统采用单向高速直流电机作为动力部件,对入射激光光斑进行空间压缩、整形最终以线激光方式扫描出射,激光扫描线速度可达100m/s。如图2所示,振镜扫描速度设置为15m/s,MASM系统速度设置为50m/s,平台垂直线扫描方向移动速度为90mm/s,激光始终处于开光状态即激光利用率100%。振镜相邻行间距为0.81mm,MASM系统相邻行间距为0.18mm。

图3 EDS效果图 左:指示光EDS对比图 右:激光EDS对比图
如图3所示,MASM系统内的边缘消光EDS子系统(Edge Deal System)能够彻底解决边缘过烧问题,控制激光从边缘到非边缘区域平滑过渡。图3左为未消光到消光状态,指示红光两端被削弱;图3右为清洗后左右两端分别为未消光和消光对比,消光区域平滑过渡到基材。负责清洗技术创新开发的技术总工汤发全介绍“机器人应用式MASM系统能够满足30光斑至40光斑激光下,扫描速度依旧可达到50m/s,非常适合大功率脉冲激光清洗应用”。MASM阵列扫描镜系统开发为大功率高速激光清洗应用、小功率手持焊缝清洗提供有效解决方案。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 全自动焊接流水线
全自动焊接流水线 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 Ehave
Ehave 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 自调式滚轮架 可调式滚轮架
自调式滚轮架 可调式滚轮架 中柱环保 PP焊条 欢迎咨询
中柱环保 PP焊条 欢迎咨询 逆变直流手工弧焊电焊机 ZX7-315 工业级电焊机 双机芯超稳定
逆变直流手工弧焊电焊机 ZX7-315 工业级电焊机 双机芯超稳定 waso轻型家用双电压可3.2MM焊条长时间焊机 氩弧焊 焊
waso轻型家用双电压可3.2MM焊条长时间焊机 氩弧焊 焊 供应逆变交直流脉冲氩弧焊机
供应逆变交直流脉冲氩弧焊机 焊接机器人 二保焊机器人 伺服控制焊接机器人
焊接机器人 二保焊机器人 伺服控制焊接机器人 咨询 深圳激光切割机厂家、激光切割机价格
咨询 深圳激光切割机厂家、激光切割机价格 海瑞祥科技 伊萨焊机 淮南工业级气体保护焊机NB-315 NB-350 NB-500 EISA气保氩弧焊丝
海瑞祥科技 伊萨焊机 淮南工业级气体保护焊机NB-315 NB-350 NB-500 EISA气保氩弧焊丝








