
11.4.1 调用子工程命令(Procedure)
Procedure 是子工程(过程)编辑命令。在 Procedure 程序段里,可以编辑用于复用的程序段,很方便的加载到其它的项目程序段中。工程文件和子工程文件中均可以调用子工程命令。
➢ 在工具栏工程或者过程下点击新建,工程逻辑处显示 New Project 或 NewProcedure。
➢ 在程序列表中选中需要插入子工程命令的逻辑行,在工具栏点击条件下的高级条件,在属性窗口处点击 Procedure。
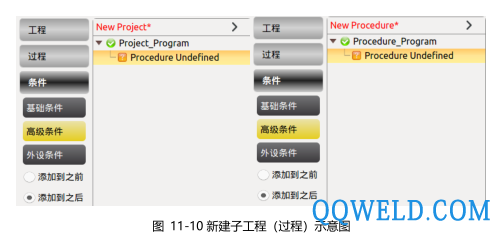
➢ 在程序列表处点击 Project_Program 或者 Procedure_Program 可以更改其名称

图 11-11 更改程序列表中子工程(过程)名称
➢ 注意:Procedure 过程程序段中不能插入 Thread 程序。
➢ 选中工程列表处的 Procedure Undefined,在属性窗口会显示可供调用的子工程文件。
➢ 选中子工程文件,点击确认即调用了该子工程文件,此时,被调用的子工程文件中的命令显示在工程列表处。

➢ 点击刷新为文件更新按钮,检索当前文件保存目录,更新显示文件变动。
11.5 移动命令( move )
Move(移动)命令用于机器人末端工具中心点在路点间的移动操作。通过基本路点(waypoint)控制机器人的运行,路点(waypoint)必须置于运动命令下。
➢ 在程序列表里新增一个 Move 节点,下面含有一个 Waypoint 节点。
➢ 点击昵称右侧输入框可修改命令名称。
➢ 选中 Move 节点,可以对 Move 命令进行状态配置。
➢ 机械臂运动属性有三种选择:轴动运动、直线运动和轨迹运动。将在之后小结进行详细介绍。
➢ 点击翻转可以倒序复制 Move 节点下的所有 Waypoint 路点。
➢ 点击移除可删除此 Move 命令。
➢ 必须点击确认,确认配置完成,并保存。
➢ 直线运动以及轨迹运动中的 arc 和 Movep 运动模式属于笛卡尔空间轨迹规划,
需要做逆运动学求解。因而可能存在无解、多解、逼近解的情况;而且由于关节空间和笛卡尔空间的非线性关系,可能会出现轴动运动超出其最大速度和加速度限制的情况。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 Ehave
Ehave 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 全自动焊接流水线
全自动焊接流水线 大量出售 多款供选J系列滚轮架减速机
大量出售 多款供选J系列滚轮架减速机 ABB焊接机器人 架焊接机器人 工业机器人 二手机器人
ABB焊接机器人 架焊接机器人 工业机器人 二手机器人 山东减速机维修多少钱
山东减速机维修多少钱 申江牌不锈钢4立方储气罐 螺纹法兰接口 规格齐全 支持定制
申江牌不锈钢4立方储气罐 螺纹法兰接口 规格齐全 支持定制 氩弧焊机冷却水泵 冷却水泵40-250b 冷却液水泵 唐
氩弧焊机冷却水泵 冷却水泵40-250b 冷却液水泵 唐 【值得购买】焊接滚轮架/可调式30吨滚轮架/苏州无锡滚轮架
【值得购买】焊接滚轮架/可调式30吨滚轮架/苏州无锡滚轮架 点光源自动焊锡机光源自动焊接机,电子玩具自动焊接设备 焊锡机器人点光源自动焊接机器人
点光源自动焊锡机光源自动焊接机,电子玩具自动焊接设备 焊锡机器人点光源自动焊接机器人 供应北京焊接机器人(集成)焊接机器人/自动焊接机器人系统
供应北京焊接机器人(集成)焊接机器人/自动焊接机器人系统








