
 上海市苏州河的河道环境复杂,水面障碍物多,附近高楼林立,桥梁多,信号干扰严重,甚至出现黑障现象,河道的客观环境条件造成了船艇在无人值守时自主巡航的困难和巨大挑战。中科院合肥研究院研发激光雷达、双目立体视觉相机、毫米波雷达等多模融合感知技术,能够准确地感知障碍物和识别桥梁等水面目标,解决了水面机器人的智能感知问题;研发卫星导航、惯性导航和电子罗盘融合的导航定位技术,解决城市复杂信号干扰情况下的定位导航问题。为了解决无人状态下系统的可靠性和冗余度,中科院合肥研究院分别采用嵌入式和工业控制计算机双操作系统并互为备份,同时采用了无缝切换的混合动力系统,并使用了完全物理隔离的多模操作方式,确保控制系统的安全性。 我国有丰富的水域资源,水生态环境现状不容乐观。长期以来,我国对河流、湖泊的清理和监测等主要依靠人工进行,效率低,周期长,监测范围有限,难以有效地进行治理。因此,亟须智能化、自动化、安全和高效的水面清洁设备。但目前国内外尚无实用化的水面清洁机器人或同类产品,已有的水面清洁无人船多数是遥控式或者采用嵌入式系统的无人操作功能,缺少基于高速计算平台和智能感知的人工智能软硬件技术,因此智能化和自动化程度较低、抗风浪等级低、保洁作业功能弱,仅能在景观湖等风浪较小的水域作业,严格意义上只是属于初级无人船,还无法实现全自主的智能保洁作业。 “我们研制的智能保洁水面机器人最大排水量超过5吨,一次作业能清扫3立方米以上的水面漂浮物,在国内首次达到B级航区自主作业能力,并实现了产业化。 2018年,曾在上海首届中国国际进口博览会期间用于黄浦江水面保洁作业,效果良好。 ”“水面保洁机器人”研究团队余道洋博士介绍,此次皖产水面机器人用于上海市苏州河水面无人保洁服务,为上海的生态之城建设增添了智能化技术水平,减轻了人工劳动强度。 “该水面机器人具有在多种河道运行的通用性,可以根据需求进一步扩展用于水质移动监测、水生态修复和治理、水文地质探测和测绘、应急救援、重要水域安防等,有望在上海和全国推广应用。 ”
上海市苏州河的河道环境复杂,水面障碍物多,附近高楼林立,桥梁多,信号干扰严重,甚至出现黑障现象,河道的客观环境条件造成了船艇在无人值守时自主巡航的困难和巨大挑战。中科院合肥研究院研发激光雷达、双目立体视觉相机、毫米波雷达等多模融合感知技术,能够准确地感知障碍物和识别桥梁等水面目标,解决了水面机器人的智能感知问题;研发卫星导航、惯性导航和电子罗盘融合的导航定位技术,解决城市复杂信号干扰情况下的定位导航问题。为了解决无人状态下系统的可靠性和冗余度,中科院合肥研究院分别采用嵌入式和工业控制计算机双操作系统并互为备份,同时采用了无缝切换的混合动力系统,并使用了完全物理隔离的多模操作方式,确保控制系统的安全性。 我国有丰富的水域资源,水生态环境现状不容乐观。长期以来,我国对河流、湖泊的清理和监测等主要依靠人工进行,效率低,周期长,监测范围有限,难以有效地进行治理。因此,亟须智能化、自动化、安全和高效的水面清洁设备。但目前国内外尚无实用化的水面清洁机器人或同类产品,已有的水面清洁无人船多数是遥控式或者采用嵌入式系统的无人操作功能,缺少基于高速计算平台和智能感知的人工智能软硬件技术,因此智能化和自动化程度较低、抗风浪等级低、保洁作业功能弱,仅能在景观湖等风浪较小的水域作业,严格意义上只是属于初级无人船,还无法实现全自主的智能保洁作业。 “我们研制的智能保洁水面机器人最大排水量超过5吨,一次作业能清扫3立方米以上的水面漂浮物,在国内首次达到B级航区自主作业能力,并实现了产业化。 2018年,曾在上海首届中国国际进口博览会期间用于黄浦江水面保洁作业,效果良好。 ”“水面保洁机器人”研究团队余道洋博士介绍,此次皖产水面机器人用于上海市苏州河水面无人保洁服务,为上海的生态之城建设增添了智能化技术水平,减轻了人工劳动强度。 “该水面机器人具有在多种河道运行的通用性,可以根据需求进一步扩展用于水质移动监测、水生态修复和治理、水文地质探测和测绘、应急救援、重要水域安防等,有望在上海和全国推广应用。 ” 近日,上海市民惊奇地发现,在苏州河面上出现了一艘用于智能保洁的无人船,可以在无人驾驶的情况下,自动清扫树叶、垃圾袋、废纸、空塑料瓶等水面漂浮垃圾。这艘被称为“水面保洁机器人”的无人船,由中科院合肥物质科学研究院固体所刘锦淮研究员课题组研制。
上海市苏州河的河道环境复杂,水面障碍物多,附近高楼林立,桥梁多,信号干扰严重,甚至出现黑障现象,河道的客观环境条件造成了船艇在无人值守时自主巡航的困难和巨大挑战。中科院合肥研究院研发激光雷达、双目立体视觉相机、毫米波雷达等多模融合感知技术,能够准确地感知障碍物和识别桥梁等水面目标,解决了水面机器人的智能感知问题;研发卫星导航、惯性导航和电子罗盘融合的导航定位技术,解决城市复杂信号干扰情况下的定位导航问题。为了解决无人状态下系统的可靠性和冗余度,中科院合肥研究院分别采用嵌入式和工业控制计算机双操作系统并互为备份,同时采用了无缝切换的混合动力系统,并使用了完全物理隔离的多模操作方式,确保控制系统的安全性。 我国有丰富的水域资源,水生态环境现状不容乐观。长期以来,我国对河流、湖泊的清理和监测等主要依靠人工进行,效率低,周期长,监测范围有限,难以有效地进行治理。因此,亟须智能化、自动化、安全和高效的水面清洁设备。但目前国内外尚无实用化的水面清洁机器人或同类产品,已有的水面清洁无人船多数是遥控式或者采用嵌入式系统的无人操作功能,缺少基于高速计算平台和智能感知的人工智能软硬件技术,因此智能化和自动化程度较低、抗风浪等级低、保洁作业功能弱,仅能在景观湖等风浪较小的水域作业,严格意义上只是属于初级无人船,还无法实现全自主的智能保洁作业。 “我们研制的智能保洁水面机器人最大排水量超过5吨,一次作业能清扫3立方米以上的水面漂浮物,在国内首次达到B级航区自主作业能力,并实现了产业化。 2018年,曾在上海首届中国国际进口博览会期间用于黄浦江水面保洁作业,效果良好。 ”“水面保洁机器人”研究团队余道洋博士介绍,此次皖产水面机器人用于上海市苏州河水面无人保洁服务,为上海的生态之城建设增添了智能化技术水平,减轻了人工劳动强度。 “该水面机器人具有在多种河道运行的通用性,可以根据需求进一步扩展用于水质移动监测、水生态修复和治理、水文地质探测和测绘、应急救援、重要水域安防等,有望在上海和全国推广应用。 ”
上海市苏州河的河道环境复杂,水面障碍物多,附近高楼林立,桥梁多,信号干扰严重,甚至出现黑障现象,河道的客观环境条件造成了船艇在无人值守时自主巡航的困难和巨大挑战。中科院合肥研究院研发激光雷达、双目立体视觉相机、毫米波雷达等多模融合感知技术,能够准确地感知障碍物和识别桥梁等水面目标,解决了水面机器人的智能感知问题;研发卫星导航、惯性导航和电子罗盘融合的导航定位技术,解决城市复杂信号干扰情况下的定位导航问题。为了解决无人状态下系统的可靠性和冗余度,中科院合肥研究院分别采用嵌入式和工业控制计算机双操作系统并互为备份,同时采用了无缝切换的混合动力系统,并使用了完全物理隔离的多模操作方式,确保控制系统的安全性。 我国有丰富的水域资源,水生态环境现状不容乐观。长期以来,我国对河流、湖泊的清理和监测等主要依靠人工进行,效率低,周期长,监测范围有限,难以有效地进行治理。因此,亟须智能化、自动化、安全和高效的水面清洁设备。但目前国内外尚无实用化的水面清洁机器人或同类产品,已有的水面清洁无人船多数是遥控式或者采用嵌入式系统的无人操作功能,缺少基于高速计算平台和智能感知的人工智能软硬件技术,因此智能化和自动化程度较低、抗风浪等级低、保洁作业功能弱,仅能在景观湖等风浪较小的水域作业,严格意义上只是属于初级无人船,还无法实现全自主的智能保洁作业。 “我们研制的智能保洁水面机器人最大排水量超过5吨,一次作业能清扫3立方米以上的水面漂浮物,在国内首次达到B级航区自主作业能力,并实现了产业化。 2018年,曾在上海首届中国国际进口博览会期间用于黄浦江水面保洁作业,效果良好。 ”“水面保洁机器人”研究团队余道洋博士介绍,此次皖产水面机器人用于上海市苏州河水面无人保洁服务,为上海的生态之城建设增添了智能化技术水平,减轻了人工劳动强度。 “该水面机器人具有在多种河道运行的通用性,可以根据需求进一步扩展用于水质移动监测、水生态修复和治理、水文地质探测和测绘、应急救援、重要水域安防等,有望在上海和全国推广应用。 ” 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 Ehave
Ehave KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架 全自动焊接流水线
全自动焊接流水线 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 专业定做 重型滚轮架 ZT500焊接滚轮架 河北沧州 重型滚轮架 质优价廉
专业定做 重型滚轮架 ZT500焊接滚轮架 河北沧州 重型滚轮架 质优价廉 供应天津辉腾KT80可调式焊接滚轮架 80吨可调滚轮架价格优惠
供应天津辉腾KT80可调式焊接滚轮架 80吨可调滚轮架价格优惠 Panasonic/松下气保焊、松下YD-500GS气保焊机
Panasonic/松下气保焊、松下YD-500GS气保焊机 弧焊接机器人,机器人焊接,集成机器人焊接,自动焊接机器人
弧焊接机器人,机器人焊接,集成机器人焊接,自动焊接机器人 佳士NB-270 电焊机便携半自动动气保焊机 电焊机气保焊机
佳士NB-270 电焊机便携半自动动气保焊机 电焊机气保焊机 昆山鹏欣硅片硅料回收公司
昆山鹏欣硅片硅料回收公司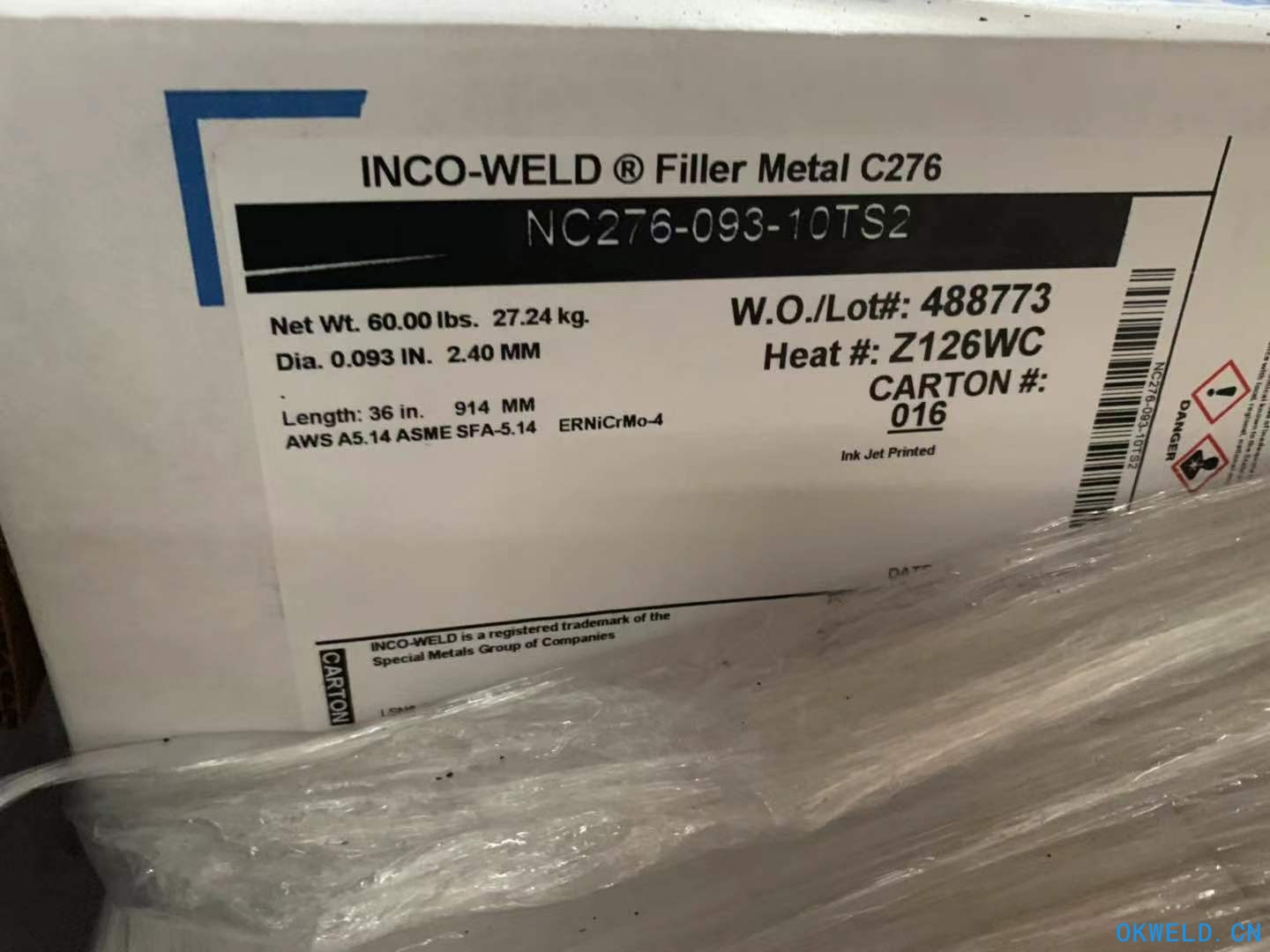 美国SMC INCO-WELD C-276 焊丝
美国SMC INCO-WELD C-276 焊丝 四轴冲压机器人 喷涂机器人 吸塑机器人 焊接机器人
四轴冲压机器人 喷涂机器人 吸塑机器人 焊接机器人








