

Ravi博士说,通过扫描光圈,蜜蜂能够通过控制速度和姿势巧妙地通过闸门,甚至在孔洞小于它们的翼展时还能侧身飞行。这种行为需要意识到它们的身体形状和尺寸相对于障碍物的形状和尺寸大小,这是第一次在飞行的无脊椎动物身上看到这样的证据。 "以前的研究认为,复杂的过程,如对自我尺寸的感知,是由认知驱动的,只存在于大脑大的动物中。然而,我们的研究表明,小昆虫的大脑虽然小,也可以理解它们的身体大小,并在复杂环境中飞行时使用这些信息,"Ravi说。 蜜蜂利用深度感知和空间意识扫描一个特征的过程,建立了一个全面的孔径地图,并可以改变自己的身体方向以适应通过缝隙,类似于人类通过调整肩膀来通过狭窄的门。"我们惊讶地看到,在某些情况下,蜜蜂调整了自己的侧向,以飞过它们无法正面通过的缝隙。这些昆虫的灵巧性确实让我们思考我们还能解开哪些秘密的蜜蜂行为。"Ravi博士说。

该研究还为将蜜蜂的特性应用于机器人技术提供了灵感,其潜在应用于下一代无人机和自动驾驶车辆技术,以应对在现实世界条件下飞行的挑战。 "昆虫是机器人的奇妙模型,因为它们拥有超乎寻常的小脑,却能执行过于复杂的任务。几千年来,大自然赋予昆虫一些惊人的属性。我们现在面临的挑战是,如何利用这一点,将类似的编码应用到未来的机器人系统中,增强它们在自然界中的性能。"Ravi博士说。 论文标题为《Bumblebees perceive the spatial layout of their environment in relation to their body size and form to minimize inflight collisions》。
 凯泉KAIQUAN
凯泉KAIQUAN 铁锚
铁锚 大桥
大桥 金桥
金桥 京雷
京雷 天泰
天泰 博威合金BOWAY
博威合金BOWAY 马扎克Mazak
马扎克Mazak 威尔泰克
威尔泰克 迈格泰克
迈格泰克 斯巴特
斯巴特 MAOSHENG贸盛
MAOSHENG贸盛 Miller米勒
Miller米勒 新世纪焊接
新世纪焊接 西安恒立
西安恒立 上海特焊
上海特焊 新天激光
新天激光 海目星激光
海目星激光 迅镭激光
迅镭激光 粤铭YUEMING
粤铭YUEMING 镭鸣Leiming
镭鸣Leiming 领创激光
领创激光 天琪激光
天琪激光 亚威Yawei
亚威Yawei 邦德激光bodor
邦德激光bodor 扬力YANGLI
扬力YANGLI 宏山激光
宏山激光 楚天激光
楚天激光 百超迪能NED
百超迪能NED 金运激光
金运激光 LVD
LVD Tanaka田中
Tanaka田中 BLM
BLM 易特流etal
易特流etal 百盛激光
百盛激光 Messer梅塞尔
Messer梅塞尔 大焊 焊机匠心品质 精工之作 行家之选
大焊 焊机匠心品质 精工之作 行家之选 创力 CANLEE光纤激光切割机
创力 CANLEE光纤激光切割机 松下 旗下LAPRISS机器人激光焊接系统
松下 旗下LAPRISS机器人激光焊接系统 上海通用电气 全焊机系列展示
上海通用电气 全焊机系列展示 KUKA 库卡摩多机器人流水线作业
KUKA 库卡摩多机器人流水线作业 全自动焊接流水线
全自动焊接流水线 Ehave
Ehave 川崎工业焊接机器人 焊接管架
川崎工业焊接机器人 焊接管架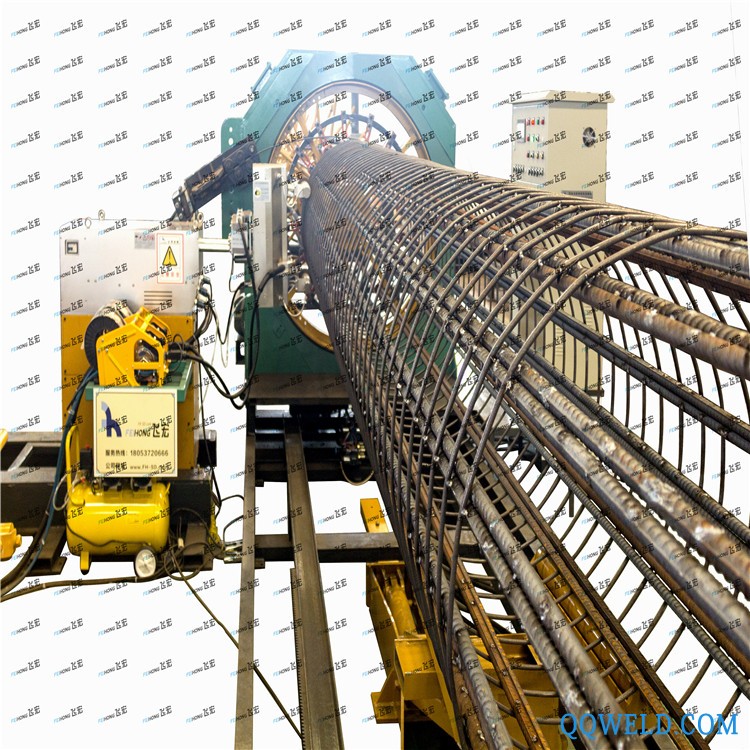 飞宏FHR-1500 钢筋笼自动焊接机器人
飞宏FHR-1500 钢筋笼自动焊接机器人 百事达焊接机械人 高精度机器人 高精度焊接机器人
百事达焊接机械人 高精度机器人 高精度焊接机器人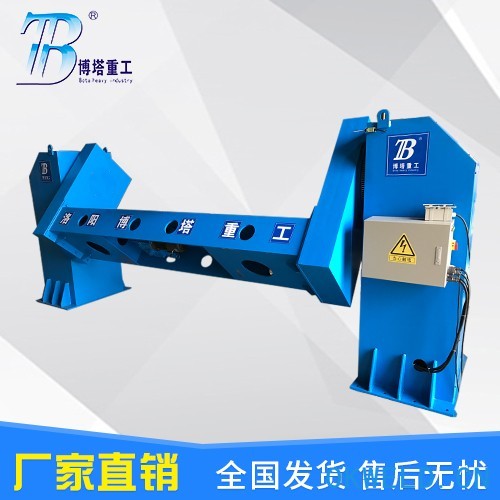 洛阳博塔重工双立柱变位机
洛阳博塔重工双立柱变位机 松下315逆变直流氩弧焊机 二手氩弧焊机 进口焊机 松下焊机 松下氩弧焊机维修
松下315逆变直流氩弧焊机 二手氩弧焊机 进口焊机 松下焊机 松下氩弧焊机维修 硬齿面齿轮减速机的换油周期
硬齿面齿轮减速机的换油周期 上海沪工WS-250K便携电焊机逆变直流手工家用电焊机氩弧焊机220v
上海沪工WS-250K便携电焊机逆变直流手工家用电焊机氩弧焊机220v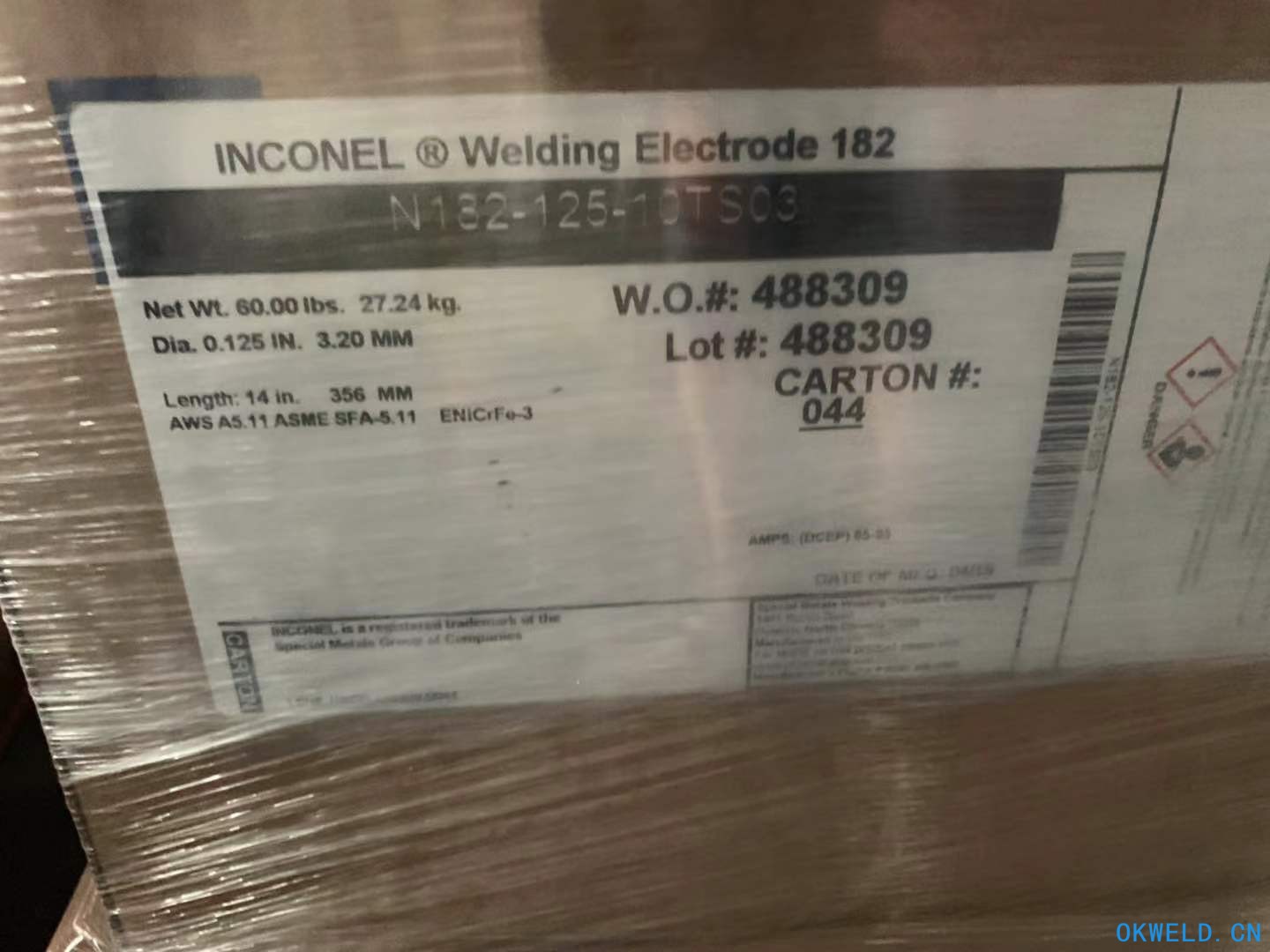 美国SMC INCONEL 182 焊条
美国SMC INCONEL 182 焊条 源旺YWH-1600 焊接机器人厂家 厂家直销工业机器人 打磨机器人 可用于学校教学
源旺YWH-1600 焊接机器人厂家 厂家直销工业机器人 打磨机器人 可用于学校教学








